Съвременни безчеткови DC двигатели
Благодарение на значителен напредък в областта на полупроводниковата електроника и в технологията за създаване на мощни неодимови магнити, безчетковите DC двигатели се използват широко днес. Използват се в перални машини, прахосмукачки, вентилатори, дронове и др.
И въпреки че идеята за принципа на работа на безчетков двигател е изразена още в началото на 19 век, тя чака в крилата до началото на полупроводниковата ера, когато технологиите стават готови за практическото внедряване на тази интересна и ефективна концепция, която позволи на безчетковите постояннотокови двигатели да се разхождат толкова широко, колкото днес. …

В английската версия се наричат двигатели от този тип BLDC мотор — Безчеткови двигатели с постоянен ток — безчетков DC двигател. Роторът на двигателя съдържа постоянни магнити, а работните намотки са разположени на статора, тоест моторното устройство BLDC е напълно противоположно на това, което е в класическия четкан мотор. BLDC двигателят се управлява от електронен регулатор, наречен ESC — Електронен регулатор на скоростта — електронен регулатор на пътуването.
Електронен регулатор и висока ефективност
Електронният регулатор позволява плавно да се променя електрическата енергия, подавана към безчетковия двигател. За разлика от по -опростените версии на резистивни регулатори на скоростта, които просто ограничават мощността чрез последователно свързване на резистивен товар с двигателя, който преобразува излишната мощност в топлина, електронното управление на скоростта осигурява значително по -висока ефективност, без да се губи доставената електрическа енергия за ненужно отопление. ..
Безчетковият DC двигател може да бъде класифициран като самосинхронизиращ се синхронен двигател, при който искрящ възел, изискващ редовна поддръжка, е напълно изключен — колекционер… Функцията на колектора се поема от електрониката, поради което целият дизайн на продукта се опростява значително и става по -компактен.
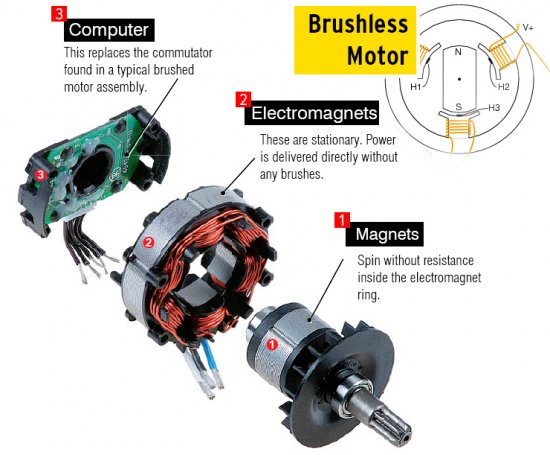
Четките всъщност са заменени с електронни ключове, загубите в които са много по -малки, отколкото биха били при механично превключване. Мощните неодимови магнити на ротора позволяват по -голям въртящ момент на вала. И такъв двигател се загрява по -малко от своя предшественик на колектора.
В резултат на това ефективността на двигателя е най -добрата, а мощността на килограм тегло е по -висока, плюс доста широк диапазон от регулиране на скоростта на ротора и почти пълна липса на генерирани радиосмущения. Конструктивно двигателите от този тип са лесно адаптирани за работа във вода и в агресивни среди.
Електронният блок за управление е много важна и скъпа част от безчетков двигател с постоянен ток, с който обаче не може да се откаже. От това устройство двигателят получава мощност, чиито параметри едновременно влияят както на скоростта, така и на мощността, която двигателят ще може да развие при натоварване.
Дори ако скоростта на въртене не се нуждае от регулиране, все още е необходим електронен блок за управление, тъй като той носи не само контролната функция, но и има компонент за захранване. Можем да кажем, че ESC е аналог на честотен регулатор за асинхронни AC двигателиспециално проектиран за захранване и управление на безчеткови DC двигател.
BLDC управление на двигателя
За да разберем как се управлява BLDC мотор, нека първо си спомним как работи комутаторният двигател. В основата си принципът на въртене на рамката с ток в магнитно поле.
Всеки път, когато рамката с тока се завърти и намери равновесно положение, комутаторът (четките притиснати към колектора) променя посоката на тока през рамката и рамката продължава. Този процес се повтаря, когато рамката се движи от полюс към полюс. Само в колекторния двигател има много такива рамки и има няколко двойки магнитни полюси, поради което колекторът-четка съдържа не два контакта, а много.
ECM прави същото. Той променя полярността на магнитното поле веднага щом роторът трябва да се извие по -далеч от равновесното положение. Само управляващото напрежение не се подава към ротора, а към намотките на статора и това става с помощта на полупроводникови превключватели в точното време (фази на ротора).
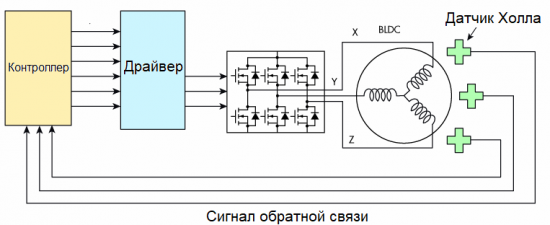
Очевидно е, че токът към намотките на статора на безчетков двигател трябва да се подава в правилното време, тоест когато роторът е в определено известно положение. За да направите това, използвайте един от следните методи. Първият се основава на датчика за положение на ротора, вторият е чрез измерване на ЕРС на една от намотките, която в момента не получава енергия.
Сензорите са различни, магнитни и оптични, най -популярни са магнитните сензори Ефект на Хол… Вторият метод (базиран на измерване на ЕМП), макар и ефективен, не позволява прецизен контрол при ниски скорости и при стартиране. Холовите сензори, от друга страна, осигуряват по -прецизен контрол във всички режими. В трифазни BLDC двигатели има три такива сензора.
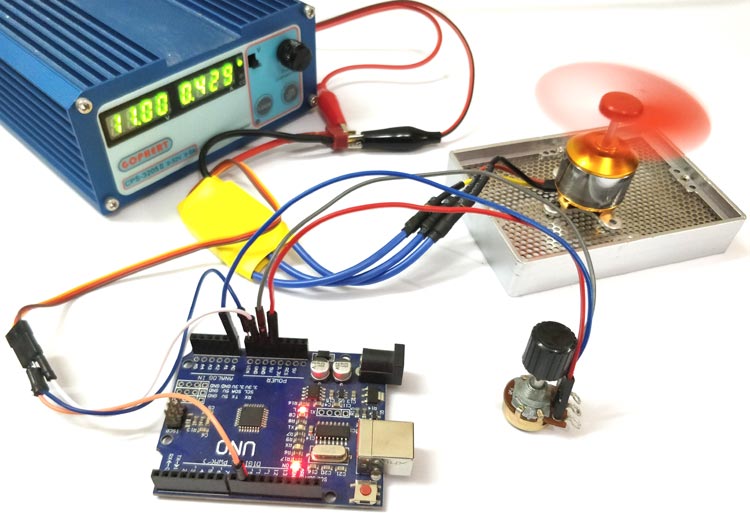
Двигатели без сензори за положение на ротора са приложими в случаите, когато двигателят стартира без натоварване на вала (вентилатор, витло и др.). Ако стартирането се извършва под товар, е необходим двигател с датчици за положение на ротора. И двата варианта имат своите плюсове и минуси.
Решение със сензор се превръща в по -удобно управление, но ако поне един от сензорите се повреди, двигателят ще трябва да бъде разглобен, освен това сензорите изискват отделни проводници. При версията без сензор няма нужда от специални проводници, но по време на стартирането роторът ще се люлее напред -назад. Ако това е неприемливо, е необходимо да инсталирате сензори в системата.
Ротор и статор, брой фази
Роторът на BLDC мотор може да бъде външен или вътрешен, а статорът съответно вътрешен или външен. Статорът е изработен от магнитно проводим материал, с броя на зъбите, който е напълно разделен на броя на фазите. Роторът може да бъде направен, не непременно от магнитно проводим материал, но задължително с магнити, здраво закрепени към него.

Колкото по -силни са магнитите, толкова по -голям е наличният въртящ момент. Броят на зъбите на статора не трябва да е равен на броя на магнитите на ротора. Минималният брой зъби е равен на броя на контролните фази.
Повечето съвременни безчеткови DC двигатели са трифазни, просто поради простотата на дизайна и начина на управление. Както при променливотокови асинхронни двигатели, намотките на трите фази са свързани тук към статора чрез „триъгълник“ или „звезда“.
Такива двигатели без сензори за положение на ротора имат 3 захранващи проводника, а двигатели със сензори имат 8 проводника: два допълнителни проводника за захранване на сензорите и три за сигналните изходи на сензорите.
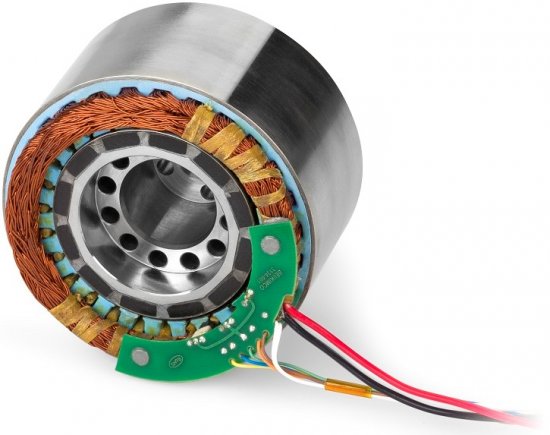 Намотката на статора е направена с изолирана медна жица, така че да образува магнитните полюси на необходимия брой фази, равномерно разпределени по обиколката на ротора.Броят на свободно стоящите полюси на статора за всяка фаза се избира въз основа на необходимата скорост на двигателя (и въртящ момент).
Намотката на статора е направена с изолирана медна жица, така че да образува магнитните полюси на необходимия брой фази, равномерно разпределени по обиколката на ротора.Броят на свободно стоящите полюси на статора за всяка фаза се избира въз основа на необходимата скорост на двигателя (и въртящ момент).
Нискоскоростните двигатели с външен ротор са направени с голям брой полюси (и съответно зъби) на фаза, за да се получи въртене с ъглова честота, значително по-малка от честотата на управляващия ток. Но дори и при високоскоростни трифазни двигатели броят на зъбите по-малък от 9 обикновено не се използва.