Системи за автоматизация: системи за автоматично управление, управление и регулиране
 Всичко елементите автоматизация по естеството и обема на извършените операции те се подразделят на системи: автоматично управление, автоматично управление, автоматично регулиране.
Всичко елементите автоматизация по естеството и обема на извършените операции те се подразделят на системи: автоматично управление, автоматично управление, автоматично регулиране.
Автоматична система за управление (Фиг. 1) е проектиран да контролира хода на процеса. Такава система включва сензор B, усилвател A, който приема сигнал от сензора и го предава след усилване към специален елемент P, който осъществява последната операция на автоматичното управление — представянето на контролираната стойност във вид, удобен за наблюдение или регистрация.
В конкретен случай сигналните лампи или устройствата за звукова сигнализация могат да служат като задействащ елемент P. Система с такива елементи се нарича алармена система.

Ориз. 1. Автоматична система за управление
В системата за автоматично управление, освен посочените на фиг. 1, могат да влизат и други елементи — стабилизатори, захранвания, разпределители (ако има няколко контролни точки или няколко сензора в един задвижващ механизъм P) и др.
Независимо от броя на елементите на системата за автоматично управление, те са с отворен контур и сигналът в тях преминава само в една посока — от управляващия обект Е към задвижващия механизъм P.
Автоматична система за управление е предназначен за частичен или пълен (без човешко участие) контрол на обект или технологичен процес. Тези системи се използват широко за автоматизация, например за стартиране на процеси, контрол на скоростта и заден ход на електродвигатели в електрически задвижвания за всякакви цели.
Необходимо е да се посочи такъв важен тип автоматични системи за управление като автоматични системи за защита, които не позволяват авариен или ограничителен режим, прекъсвайки контролирания процес в критичен момент.

Автоматична система за управление поддържа регулируемата стойност в определените граници. Това са най -сложните системи за автоматизация, които съчетават функциите на автоматичен мониторинг и контрол. Неразделна част от тези системи — регулатор.
Ако системите изпълняват само една задача — поддържат постоянна контролирана стойност, те се наричат автоматични системи за стабилизиране. Съществуват обаче такива процеси, за които е необходимо да се променя регулираната стойност във времето според определен закон, като се гарантира нейната стабилност в определени области. В този случай се извиква автоматичната система софтуерна система за управление.
За да се осигури постоянството на контролираната стойност, може да се използва един от принципите за управление — чрез отклонение, смущение или комбинирано, което ще бъде взето предвид по отношение на системите за управление на напрежението на DC генераторите.
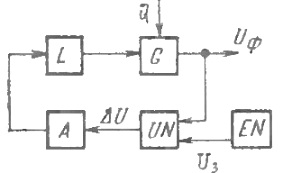
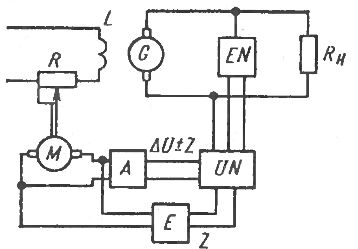
При регулиране чрез отклонение (фиг. 2 и 3) Елементът за сравнение на ООН сравнява действителното напрежение Uф с дадено Uз, определено от настройващия елемент EN. След сравнение, сигналът се появява на изхода на елемента UN ΔU = Uз — Uf, пропорционално на отклонението на напрежението от даденото. Този сигнал се усилва от усилвател А и се подава към работния елемент L.Промяната в напрежението на работния елемент L, която е възбуждащата намотка на генератора G, води до промяна в действителното напрежение на генератора, елиминирайки отклонението му от даденото.
Усилвател А, който не променя принципа на работа на системата, е необходим за практическото му изпълнение, когато мощността на сигнала, идващ от сравнителния елемент UN, е недостатъчна, за да повлияе на работния елемент L.
Ориз. 2. Автоматична система за управление
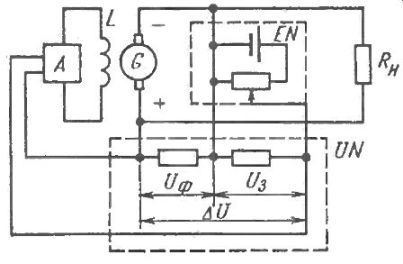
Ориз. 3. Автоматичен контрол на отклоненията
Наред с референтния ефект, системата може да бъде повлияна от различни дестабилизиращи фактори Q, които причиняват отклонение на контролираната стойност от посочената. Въздействието на дестабилизиращи фактори, един от които условно е обозначен на фигурата с буквата Q, може да се прояви на различни места в системата и, както се казва, да идва по различни канали. Така например, промяната на температурата на околната среда води до промяна в съпротивлението във веригата на намотката на полето, което от своя страна влияе на напрежението на генератора.
Въпреки това, където и да възникнат въздействията Q (от страна на потребителя — токът на натоварване, поради промени в параметрите на веригата на възбуждане), системата за управление ще реагира на отклонението на контролираната стойност от зададената стойност, причинена от тях .

Наред с разглеждания принцип на регулиране, те използват регулиране на смущения, в който системата предвижда специални елементи, които измерват ефектите Q и влияят върху работното тяло.
В система, използваща само този принцип на управление (фиг. 4 и 5), действителната стойност на управляемата променлива не се взема предвид. Взема се предвид само едно нарушение — токът на натоварване Азн. В съответствие с промяната в тока на натоварване има промяна в магнитодвижещата сила (mds) на възбуждащата намотка L2, която е измервателният елемент на тази система. Промяната в mds на тази намотка води до съответна промяна в напрежението на клемите на генератора.
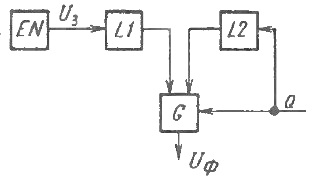
Ориз. 4. Автоматично регулиране на смущенията

Ориз. 5. Схематична диаграма на системата за автоматизация
Системата, изпълняваща комбинирано регулиране (отклонение и смущение), може да бъде получена чрез комбиниране на разглежданите по -рано системи в една (фиг. 6)
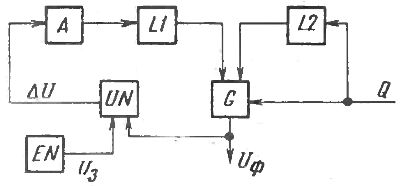
Ориз. 6. Комбинирана система за автоматизация на управлението
В системата за автоматично управление настройващият елемент беше стандарт за напрежение, с който се сравнява контролираната стойност Uе. U стойностстр обичайно е да се извиква заданието на регулатора. Като цяло контролираната стойност се обозначава с буквата Y, и неговата настройка Йо.
Ако настройката Йо в рамките на посочените граници, операторът се променя ръчно и контролираната стойност е Y, системата работи в режим на стабилизиране. Ако зададената стойност на регулатора се промени произволно във времето, системата за автоматизация, запазвайки стойността ΔY = Yo — Y =0, ще работи в режим на проследяване, т.е. наблюдава промяната Йо.
И накрая, ако настройката Йо не се променят произволно, но според познат по -рано закон (програма) системата ще работи в програмирания режим на управление. Такива системи се наричат софтуерни системи за управление.
няма затворен кръг на действие на контролирана стойност, поради което се нарича отворен.
Според принципа на действие системите за автоматизация се делят на статични и астатични. V статични системи контролираната стойност няма строго постоянна стойност и с увеличаване на натоварването се променя с определена сума, наречена грешка в регулирането.
Разглежданите системи (фиг. 1 — 6) са примери за най -простите статични системи. Наличието на грешка в регулирането в тях се дължи на факта, че е необходимо по -голямо отклонение на напрежението, за да се осигури по -голям ток на възбуждане.
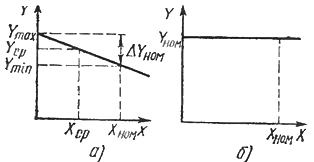
Ориз. 7. Външни характеристики на системите за автоматизация: а — статични, б — астатични
Зависимостта на напрежението на генератора от тока на натоварване под формата на права наклонена линия е показана на фиг. 7, а. Най -голямото относително отклонение на напрежението от даденото се нарича статизъм на системното напрежение: Δ = = (Хмах-Umin) / Ъмаx, където (Umаx, Umin — напрежение на генератора на празен ход и под товар. Обобщавайки направеното заключение за всяка статична система, можете да напишете: Δ = (Yмах- Yмин) /Yмаx, където Y е контролираната стойност.
Понякога статизмът се определя по различна формула: Δ = (Yмах- Yмин) /YСр. И YСр=0,5(Yмах + Yмин) — средна регулируема стойност Y… Статизмът се нарича положителен, ако с увеличаване на натоварването стойността Y намалява и отрицателен, ако стойността Y се увеличава.
В астатичните системи статизмът е нулев и следователно зависимостта на контролираната стойност от товара е линия, успоредна на оста на натоварване (фиг. 7.6).
Помислете например астатична система за автоматизация (виж фиг. 8), при което напрежението на генератора се регулира чрез промяна на съпротивлението на реостата Rвключен във веригата на намотката на полето L.
Ориз. 8. Астатична система за автоматизация
Сервомоторът M започва да се върти и да премества плъзгача на реостата R всеки път, когато се появи сигнал на входа на усилвателя A. Δ16;U относно отклонението на напрежението на генератора Ucp от дадената стойност Uстр… Плъзгачът на реостата се движи, докато сигналът за отклонение стане нула. Такава система се различава от друга система по това, че не е необходим сигнал на изхода на усилвател А за поддържане на нова стойност на тока на възбуждане. Тази разлика дава възможност да се отървете от статизма.
Прочетете повече за това тук: Статична и астатична регулация
Във всички предишни примери се приемаше, че въздействието върху работното тяло се извършва непрекъснато през целия период от време, стига да има отклонение на контролираната стойност от посочената. Това управление се нарича непрекъснатои системи — непрекъснати системи.
Съществуват обаче системи, наречени дискретни, в които действието върху работното тяло се извършва периодично, например система за регулиране на температурата на подметката на ютията, в която регулиращото действие може да предприеме само едно от двете фиксирани стойности с непрекъсната промяна в контролираната променлива — температура.
В тази система регулирането на температурата се извършва чрез включване и изключване на нагревателния елемент R според сигнала от температурния сензор (вижте — Основни елементи на автоматизацията). Когато температурата се повиши над зададената точка, сензорът отваря контакта си и изключва нагревателния елемент. Когато температурата падне под зададената точка, нагревателните елементи се включват. Тази система няма стабилно междинно състояние на работния орган и заема само две позиции — включени в страната „повече“ или включени в страната „по -малко“.

За да се осигури необходимото качество на процеса на управление в системата, могат да бъдат осигурени специални устройства, т.нар отзиви… Тези устройства се различават от другите по това, че сигналът в тях има посока, противоположна на основния управляващ сигнал.
Например, на фиг. 8 показва обратната връзка E за отклонението на контролираната променлива ΔUсвързване на изхода на усилвател А с входа на еталонния елемент UN. При положителна обратна връзка E на изхода на сравнителния елемент UN е сумата от стойностите ΔU и Z, а с отрицателни — тяхната разлика.
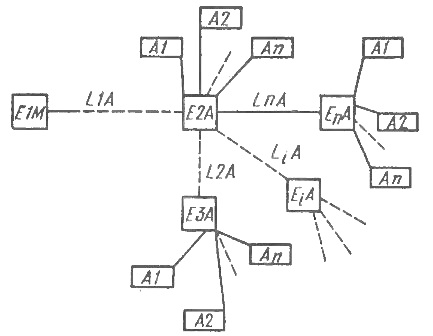
Ориз. 9. Блокова схема на телемеханичната система
Разглежданите системи за автоматизация предполагат пряка връзка на всички елементи, включени в тях. Ако елементите на системата за автоматизация са разположени на значително разстояние един от друг, за тяхното свързване се използват предаватели, комуникационни канали и приемници. Такива системи се наричат телемеханичен.
Телемеханичната система се състои от център за управление, където се намира операторът, контролиращ работата на системата, една или повече контролирани точки, където управляваните обекти A1 — An, L1A комуникационни линии — LnA (канали за предаване на данни), свързващи контролната точка E1M с контролираните точки E2A — En (фиг. 9). В телемеханичната система както всички, така и някои видове информация за мониторинг и управление могат да се предават по комуникационни линии.
При предаване на информация само за параметрите на OK телемеханичната система се извиква стелеметрична система, при които сигнали от изходите на сензорите (измервателни преобразуватели, инсталирани на OC) се предават към контролната точка E1M и се възпроизвеждат под формата на показания на показалец или цифрови измервателни устройства. Информацията може да се предава както непрекъснато, така и периодично, включително по команда на оператора.
Ако само информация за състоянието на определен обект на управление се предава до контролната точка („включено“, „изключено“, „изправно“, „дефектно“), такава система се нарича система за дистанционна сигнализация.
Телесигнализацията, подобно на телеметрията, предоставя на оператора първоначални данни за вземане на решение относно контрола на ОК или служи за разработване на контролни действия в системите за телеуправление и телерегулиране. Основната разлика на тези системи от предишните е, че в първата от тях се използват дискретни сигнали от типа «включено», «изключено», а във втората — непрекъснати, като конвенционалните системи за управление.
Прочетете също: Телеконтрол в електрическите мрежи