Използването на PID контролер в системите за автоматизация по примера на TRM148 OWEN
Автоматично регулиране, система за регулиране
Автоматичното управление е вид автоматично управление. Поддържане на постоянството на определена стойност, характеризираща технологичния процес, или промяната му съгласно даден закон, извършвано чрез измерване на състоянието на контролиран обект или смущения чрез въздействие върху регулаторния орган на обекта.
За извършване на автоматично регулиране към инсталацията, която трябва да се регулира, е свързан набор от устройства, чиято комбинация се нарича регулатор.
Въз основа на измервания на една или повече променливи, характеризиращи процеса, регулаторът влияе на процеса чрез промяна на едно или повече действия за управление, поддържайки зададената стойност на контролираната променлива.
Система за управление — система, предназначена да поддържа даден закон на промяна на определена физическа величина, се нарича контролирана величина. Зададената стойност на контролираната променлива може да бъде постоянна, или може да бъде функция на времето или някаква друга променлива.
В процеса на регулиране, контролираната стойност се сравнява с зададената стойност и при наличие на отклонение на контролираната стойност от зададената стойност, регулиращото действие влиза в обекта на управление, възстановявайки контролираната стойност.
Регулаторното действие може да бъде въведено ръчно от лице. Ако измерването на управляемата променлива и въвеждането на контролното действие се извършват с инструменти, без човешка намеса, тогава системата за управление се нарича автономна система.
В допълнение към контролното действие, системите за управление се влияят от смущения, които причиняват отклонение на управляемата променлива от зададената стойност и появата на контрол на грешки.
По естеството на промяната в контролното действие системите за управление се подразделят на автоматични системи за стабилизиране (контролното действие е постоянна стойност или е дадена функция от времето на програмираната система за управление) и сервосистеми (промяната в контролното действие се определя от неизвестно преди това контролно действие).
PID контролери
PID контролерът е готово устройство, което ще позволи на потребителя да внедри софтуерен алгоритъм за управление на едно или друго оборудване на автоматизирана система. Изграждането и конфигурирането на системи за регулиране (управление) става много по-лесно, ако използвате готови устройства като универсалния PID контролер TRM148 за 8 канала на компанията OWEN.
Да речем, че трябва да автоматизирате поддържането на правилните климатични условия в оранжерията: вземете предвид температурата на почвата в близост до корените на растенията, налягането на въздуха, влажността на въздуха и почвата и поддържайте посочените параметри чрез контрол Нагревателен елемент и фенове. Не може да бъде по -лесно, просто настройте PID контролера.
Нека първо си припомним какво е PID контролер? PID контролерът е специално устройство, което непрекъснато прецизира изходните параметри по три начина: пропорционално, интегрално и диференциално, а началните параметри са входни параметри, получени от сензори (налягане, влажност, температура, осветеност и т.н.).
Входният параметър се подава към входа на PID контролера от сензор, например от сензор за влажност. Регулаторът приема стойността на напрежението или тока, измерва го, след това прави изчисления според неговия алгоритъм и накрая изпраща сигнал до съответния изход, в резултат на което автоматизираната система получава контролно действие.Влажността на почвата намаля — поливането беше включено за няколко секунди.
Целта е да се постигне определена от потребителя стойност на влажността. Или например: осветлението е намаляло — включете фитолампи върху растенията и т.н.
PID контрол
Всъщност, въпреки че всичко изглежда просто, математиката вътре в регулатора е по -сложна, не всичко се случва в една стъпка. След включване на напояването, PID контролерът отново измерва, измервайки колко сега се е променила входната стойност — това е контролната грешка. Следващото действие върху задвижването вече ще бъде коригирано, като се вземе предвид измерената грешка в регулирането, и така нататък на всяка стъпка на управление, докато се достигне целта — зададен от потребителя параметър.
В регулирането участват три компонента: пропорционален, интегрален и диференциален. Всеки компонент има своя собствена степен на значимост във всяка конкретна система и колкото по -голям е приносът на този или онзи компонент, толкова по -съществено е той да бъде променен в процеса на регулиране.
Пропорционалният компонент е най -простият, колкото по -голяма е промяната, толкова по -голям е коефициентът (на пропорционалността във формулата), а за да се намали въздействието, е достатъчно просто да се намали коефициентът (множител).
Да речем, че влажността на почвата в оранжерията е много по -ниска от зададената — тогава времето за поливане трябва да бъде толкова дълго, колкото текущата влага е по -ниска от зададената. Това е груб пример, но принципът е приблизително такъв.
Интегрален компонент — необходимо е да се подобри точността на управление въз основа на предишни контролни събития: предишните грешки са интегрирани и върху тях е направена корекция, за да се получи в крайна сметка нулево отклонение в бъдещия контрол.
И накрая, диференциалният компонент. Тук се взема предвид скоростта на промяна на контролираната променлива. Независимо дали зададената стойност се променя съответно плавно или внезапно, контролното действие не трябва да води до прекомерни отклонения в стойността по време на контрола.

Остава да изберете устройство за PID контрол. Днес има много от тях на пазара, има многоканални, които ви позволяват да променяте няколко параметъра наведнъж, както в горния пример с оранжерия.
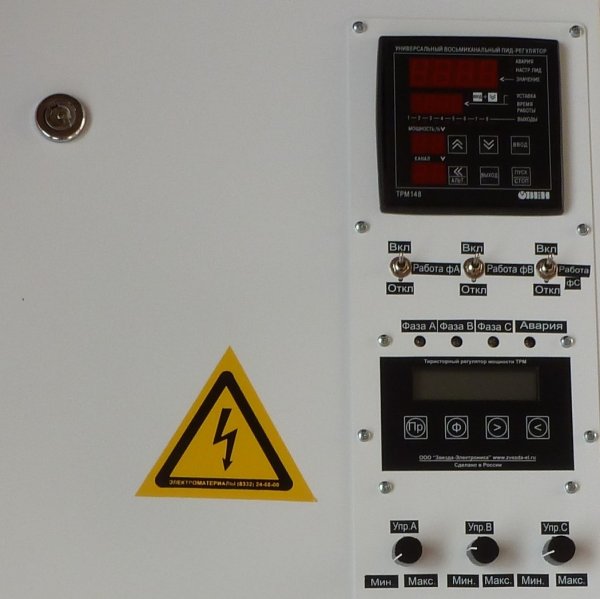
Нека разгледаме устройството на регулатора, използвайки примера на универсалния PID регулатор TRM148 от компанията OWEN.
Входните осем сензора подават сигнали към съответните входове. Сигналите се мащабират, филтрират, коригират, стойностите им могат да се видят на дисплея чрез превключване с бутони.
Изходите на устройството се произвеждат в различни модификации в необходимите комбинации от следното:
-
реле 4 A 220 V;
-
транзисторни оптрони n-p-n-тип 400 mA 60 V;
-
триакови оптрони 50 mA 300 V;
-
DAC «параметър — ток 4 … 20 mA»;
-
DAC «параметър-напрежение 0 … 10 V»;
-
4 … 6 V 100 mA изход за управление на реле в твърдо състояние.
И така, контролното действие може да бъде аналогово или цифрово. Цифров сигнал — това са импулси с променлива ширина, и аналогови — под формата на непрекъснато променливо напрежение или ток в единен диапазон: от 0 до 10 V за напрежение и от 4 до 20 mA — за токов сигнал.
Тези изходни сигнали се използват само за управление на изпълнителните устройства, да речем, помпа на напоителната система или реле, което включва и изключва нагревателния елемент или двигателя за управление на задвижващия вентил. На регулаторния панел има сигнални индикатори.
 За взаимодействие с компютър регулаторът TPM148 е оборудван с интерфейс RS-485, който позволява:
За взаимодействие с компютър регулаторът TPM148 е оборудван с интерфейс RS-485, който позволява:
-
конфигурирайте устройството на компютър (софтуерът за конфигуриране се предоставя безплатно);
-
предават в мрежата текущите стойности на измерените стойности, изходната мощност на регулатора, както и всички програмируеми параметри;
- получават оперативни данни от мрежата за генериране на контролни сигнали.