Гарантиране на безопасността при използване на индустриални роботи
Индустриалният робот е обект на повишена опасност. Първият случай на човешка смърт от действията на робот е регистриран в японски завод. Сервизният техник, който беше в работната зона, отстрани неизправността на фрезата с изключен робот и свърза робота с машината. Манипулаторът, движейки се със скорост около 1 м / сек, натисна регулатора и го смачка.
Средно има една авария на 100 индустриални робота годишно. За 14 дни експлоатация на роботизиран технологичен комплекс възникват приблизително 3 травматични ситуации.

Основните причини за наранявания по време на работата на роботите са:
- неочаквани действия на робота в процеса на неговото обучение и работа;
- грешки при ремонта и настройката на робота;
- присъствието на оператора в работната зона по време на автоматичната работа на робота;
- поставяне на контролния панел в работната зона на робота;
- неизправност или изключване на защитни устройства.
Повечето наранявания са причинени от неизправности на контролните устройства и грешки при програмирането.
В разказа „Скитникът” (1942) американският писател на научна фантастика Исак Азимов формулира три закона за безопасността на роботиката:
- роботът не трябва да наранява човек със своите действия или бездействия;
- роботът трябва да се подчинява на командите, дадени му от лицето, освен когато тези команди противоречат на първия закон;
- роботът трябва да се погрижи за неговата безопасност, ако това не противоречи на първия и втория закон.
Има три възможности за директен контакт между оператора и робота, който може да се осъществи по време на програмиране (преподаване) и работа на робота: директна работа с робота, както и по време на неговия ремонт и поддръжка.
Основното средство за гарантиране на безопасността е да се предотврати едновременното появяване на човек и движещи се елементи на робота в една точка в работната зона на робота. Защитните устройства трябва да спират движението на роботизираните елементи в тези зони на работната зона, където се намира лицето. Ако внезапно прекъсне захранването, движението на връзките на робота трябва да спре.
Работната зона е пространството, в което може да бъде разположено работното тяло на манипулатора или робота. Зависи от размерите на връзките, техните движения и кинематичната схема на манипулатора. Работната зона е зададена в описанието на манипулатора.
Най -често се определят три нива на защитни зони:
- откриване на присъствието на служител на границата на работната зона на роботизираната станция;
- откриване на присъствието на човек в зоната на покритие на станцията извън и в обхвата на движение на робота;
- директен контакт с робота или близо до ръката му.

По пътя на окачения робот трябва да се монтират мрежи за защита на хората и оборудването от внезапно падане на пренасяните предмети. Устройствата за наблюдение на изпълнението на програмата контролират появата на връзките на робота в определени точки на работната зона. Те могат да бъдат превключватели на пътеки, които се задействат, когато връзката премине през точка.
Устройствата за управление на взаимодействието на робота с околната среда изключват задвижванията на връзките, когато съпротивлението на движение се увеличи, например, когато една от връзките докосне препятствие. За измерване на натоварването се използват сензори за въртящ момент или тактилни сензори.
Ограждането на работната зона се извършва с помощта на мрежести огради и светлинни бариери. Най -често мрежестите огради се използват, за да се предотврати влизането на хора в работната зона.
Не винаги обаче е възможно да се огради напълно зоната с робота. Ако например се използват приемни конвейери, тоест повърхности, които не са оградени, през които неоторизирани лица могат да влязат в работната зона. Такива зони са защитени от оптични (светлинни) бариери.
Светлинната бариера е стойка за излъчващи светлина и стойка за фотодетектори.Ако всеки фотоприемник получава светлина от съответния излъчвател на светлина, тогава роботизираният комплекс работи. Появата на обект между стойката на излъчвателя на светлина и стойката на фотодетектора ще доведе до пресичане на светлинния лъч, което ще доведе до изключване на оборудването.
Няколко светлинни бариери се използват за ограждане на роботизирания комплекс от всички страни.
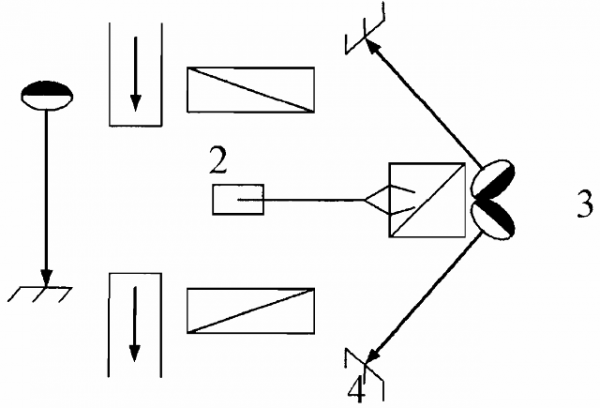
Ограждане на работната зона със светлинни бариери: 1 — технологично оборудване, 2 — робот, 3 — излъчвател на светлина, 4 — фотодетектор
Входните зони към работната зона са защитени с електрически брави заедно с автоматична система за заключване и отключване. По този начин затворът се освобождава само когато роботът е деактивиран.Допълнителните предпазни бутони в работната зона могат да предпазят човек от неконтролирано активиране на робота от неоторизирани хора.

Системата за сигурност обикновено се допълва от използването на предупредителни светлини и сирени, а самият робот и неговите движещи се части са ярко оцветени.
Допълнителна защита е използването на устройства, които откриват присъствието на човек в работната зона на робота.
В момента се използват различни системи за откриване на човешко присъствие. Например, това може да бъде: откриване на микровълнова радиация (с помощта на доплеров ефект), откриване на пасивно и активно инфрачервено лъчение, системи за зрение, промени в капацитета, налягане, използване на ултразвук и др.
За да се гарантира безопасността при използване на промишлени роботи работните места използват йерархия на работа и следователно различни отговорности. Всички дейности изискват подходящо обучение. Три вида служители са делегирани да работят с робота: оператори, програмисти и инженери по поддръжката, всеки с различни задачи и правомощия.
Операторът може да включва и изключва контролера на робота и да стартира робота от панела на оператора. Категорично му е забранено да влиза в работната зона на робота. Тази дейност е предназначена за програмисти и сервизни инженери с подходящо обучение. Освен това програмистът и инженерът отговарят за управлението и програмирането на роботи, въвеждането в експлоатация и ремонта.