Електрическо оборудване на асансьори
 Асансьорът е циклична повдигаща машина, предназначена за вертикално повдигане на хора и товари. По уговорка асансьорите се делят на пътнически, товарно-пътнически, болнични, товарни.
Асансьорът е циклична повдигаща машина, предназначена за вертикално повдигане на хора и товари. По уговорка асансьорите се делят на пътнически, товарно-пътнически, болнични, товарни.
В зависимост от скоростта на автомобила асансьорите се разделят на нискоскоростни (до 0,71 м / сек), високоскоростни (от 1 до 1,6 м / сек), високоскоростни (от 2 до 4 м / сек) и висока скорост (4 — 10 m / s) … Товароносимостта на пътническите асансьори е от 320 до 1600 кг, товарни — от 160-5000 кг. При скорост до 1,6 м / сек електродвигателят е свързан към тяговия сноп чрез скоростна кутия, ако скоростта е по -висока, тогава се използват безредукторни електрически задвижвания.

С голямо разнообразие от възможности за проектиране на пътнически и товарни асансьори, основните устройства за тях са подемна лебедка, въжета, кабина, противотежест, механична спирачка и контролно оборудване. Съвременните асансьори имат система за окачване с противотежест и въже за противовес.

Кабината се движи по вертикални релси. Кабината е окачена от въжетата, които заобикалят теглещия проводник и насочват ролките на задвижващата електрическа лебедка. В краищата на въжето има противотежест, която се движи по водачите. Масата на противотежестта е равна на сумата от масата на кабината и (0.42 — 0.5) масата на товара (или половината от най -вероятния товар на кабината).
Асансьорни задвижвания
В асансьорите и товарните асансьори се избират видовете електрически задвижвания в зависимост от скоростта на движение, броя на етажите на сградата и необходимата точност на спиране. В момента се използват следните електрически задвижвания:
а) за сгради до 17 етажа се използват нискоскоростни и високоскоростни асансьори със скорост от 0,7 до 1,4 m / s с товароносимост 320, 400 kg. Тези асансьори използват електрическо задвижване с асинхронен двускоростен електродвигател с ротор в катерица,
б) за високоскоростни пътнически асансьори със скорост 1,6 m / s, предназначени за сгради до 25 етажа, се използва електрическо задвижване съгласно системата за тиристорен регулатор на напрежението (TRN) с двускоростен асинхронен двигател (TRN-ADD ).

Наличието на регулируемо електрическо задвижване осигурява висока гладкост на процесите на ускорение и забавяне, висока точност на спиране на пода (до 20 мм) и липса на участък с намалена скорост преди спиране. Втората намотка на двигателя се използва за постигане на ниска скорост по време на ревизия,
в) за високоскоростни и високоскоростни асансьори се използват постоянни електрически задвижвания съгласно моторната система на тиристорен преобразувател-TP-D и променлив ток според системата на честотния преобразувател-късо съединение асинхронен електродвигател GGCH-AD.
Тиристорно електрическо задвижване от асансьор тип ULMP-25-16
Захранването на електрическото задвижване (фиг. 1) се осъществява от реверсивен тиристорен регулатор на напрежение UZ (TRN) при стартиране и равномерно движение и от отделен токоизправител, сглобен съгласно еднофазна мостова верига UZ1 за захранване на намотка на статора по време на динамично спиране.
Системата осигурява параметричен фазов контрол на скоростта на въртене на асинхронен двигател с катеричка. Системата за автоматично управление е направена на едночипов микрокомпютър от типа KR1816VB031, който осъществява директен цифров контрол на скоростта на въртене на двускоростен асинхронен електродвигател.
Системата за автоматично управление осигурява висока точност на поддържане на зададената скорост и спиране на нивото на необходимия под директно до зададената точка без участък с намалена скорост. Втората намотка на двигателя се включва само по време на ревизия.
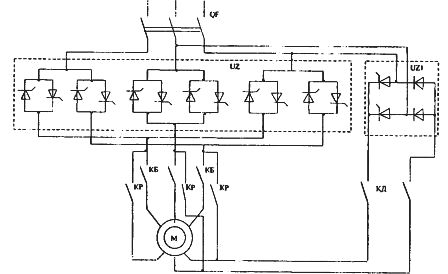
Ориз. 1. Схема на тиристорното електрическо задвижване на асансьора
Спирачни електромагнити
Повдигащите механизми на асансьорите са оборудвани със специални спирачни устройства с електромагнити с постоянен ток с къс ход и с къс ход, които са свързани към мрежа 220 или 380 V чрез токоизправител.
Устройства за управление на асансьори
Подови ключове предназначени за превключване на вериги за управление на движението. Те регистрират позицията на автомобила, автоматично избират посоката на движение («нагоре» или «надолу») и дават команда да изключат електрическото задвижване при спиране. Конструктивно това са триточкови лостови превключватели (устройства за управление на движението) за три позиции (1-0-2), имащи подвижни (на лоста) към фиксирани (върху тялото) контакти.
Подовите превключватели са монтирани в шахтата на нивото на пода, а в кабината има оформен клон, който действа върху лоста за превключване на пода.
Когато кабината се движи «нагоре» чрез завъртане на лоста, една група фиксирани контакти се затваря, а «надолу» — друга. Когато колата е на нивото на пода, превключвателят на пода е в неутрално положение «О» и фиксираните контакти са отворени.

Превключватели за скорост са проектирани да дават импулс за намаляване на скоростта преди спиране на автомобила. Те се използват в високоскоростни асансьори с електрическо задвижване с две скорости изпълнение. Те са изградени на принципа на подовите ключове, но имат различен дизайн. Превключвателите за скорост се монтират в шахтата на мината като пълен комплект над и под пода на разстояние от 0,5 до 0,6 m.
Лостови превключватели са предназначени за експлоатация на управлявани товарни асансьори. Конструктивно това са трипозиционни лостови превключватели със самостоятелно връщане на дръжката в неутрално положение („отгоре“ -0- „отдолу“), монтирани в кабината. Чрез завъртане на дръжката се избира посоката на движение, което се постига чрез затваряне на двойка фиксирани контакти. При освобождаване на дръжката контактите се отварят и двигателят спира (изключва се). Превключвателите се използват едновременно като краен превключвател в крайните позиции на кабината. Това се постига чрез действието на лоста върху ролката на специални водачи в шахтата на мината.
Индуктивни сензори предназначени за използване в високоскоростни асансьори. Диаграмата на такива сензори за променлив и коригиран ток е показана на фиг. 2.
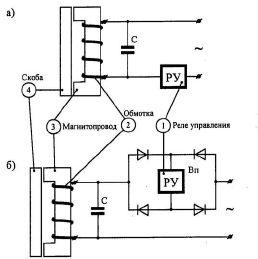
Ориз. 2. Схематична диаграма на индуктивни сензори на променлив (а) и коригиран (б) ток
В шахтата на мината е монтирана U-образна ламинирана магнитна верига, изработена от стомана 3, а върху кабината има стоманена скоба 4, която представлява магнитен шунт. На магнитната верига има бобина с намотка 2, към която управляващото реле 1 е свързано директно или чрез Vp токоизправител. Когато скобата напусне (магнитната верига се отваря), индуктивното съпротивление на бобината е малко, което ще осигури работата на контролното реле. Ако стоманената скоба припокрива магнитната верига, индуктивното съпротивление на бобината рязко се повишава и релето се освобождава.
Надеждността и яснотата на работа на управляващото реле се осигурява от включването на капацитет С успоредно на бобината, който се избира от условието за получаване на режим, близък до резонанса на токове. Използването на токоизправител за захранване на контролното реле увеличава надеждността на работата на магнитната система на релето.
В допълнение, устройствата с херметични контакти (тръстикови превключватели) се използват широко в сензорите за пътуване. Използването на индуктивни сензори елиминира такива недостатъци на подовите превключватели и превключвателите на скоростта като шум и радиосмущения, произтичащи от работата на контактните устройства.
Магнитно наслояване е електромагнитно устройство, инсталирано в кабината и контролиращо работата на ключалките на вратите на мината. Ограничителят на магнитния клон е свързан с котвата на електромагнита на клона. Когато кабината е на пода, електромагнитът на клона се обезвъздушава, ограничителят под действието на пружината премахва ключалката на ключалката на вратата на мината, позволявайки я да се отвори.
При движение електромагнитът на клона е под захранване — резето се въвежда, което забранява отварянето на вратата. Такива ключалки се използват в асансьори от стар дизайн (или модернизирани) с ръчно задвижване на вратите на вала.

Автоматизация на асансьори
Основната разлика между работата на асансьорите и подемниците е тяхното многопозиционно положение, което се изразява във факта, че механизмите могат да заемат голям брой фиксирани позиции. Следователно, след всяко спиране е необходимо да се реши логическият проблем за избор на следващото движение. Решението на този проблем в момента се осъществява с помощта на логически микросхеми и микропроцесори. За схемата за управление на асансьора са поставени следните задачи: контрол на положението на автомобила в шахтата, автоматичен избор на посоката на движение, определяне на началния час на спиране, точно спиране на автомобила на пода, автоматично отваряне и затваряне на врати и защита на електрически задвижвания и асансьор.
Командните сигнали, които задават програмата за движение на автомобила, са разделени на два вида: „поръчки“, идващи от колата, и „обаждания“, идващи от площадката за кацане. Командите се дават чрез бутони, разположени съответно в пилотската кабина и в зоните на пода. В зависимост от реакцията на командите и методите на тяхната обработка, схемите за разделно и колективно управление се различават. С отделен принцип на управление веригата възприема и изпълнява само една команда и по време на нейното изпълнение не отговаря на други поръчки и повиквания.
Тази схема е най -простата за изпълнение, но ограничава възможните характеристики на асансьора и следователно се използва само за асансьори в жилищни сгради с височина до девет етажа със сравнително малък поток от пътници. С принципа на колективното управление веригата възприема няколко команди едновременно и ги изпълнява в определена последователност, обикновено в реда на етажите.

Основата на системата за управление на асансьора е измерването на часовника на пода. Проучването на часовника може да бъде махало, когато оправянето се извършва в две посоки, отдолу нагоре и отгоре надолу, и в една посока, например, само отгоре надолу. Махането с махало се използва по -често.