Кратка история на роботиката
Автоматизация, роботика, напълно автономни производствени линии, роботизирани превозни средства, все по -мощни компютърни технологии. Станковете, системите за управление, системите за разпознаване непрекъснато се подобряват, производителността на изчислителните единици се увеличава.
Машините, създадени от човека, стават все по-сложни и широко разпространени в почти всеки клон на човешката дейност, от производството до медицината, от управлението на трафика до развлекателната индустрия.
Тази статия е за историята на роботиката, дисциплина, която помага на хората да решават проблемите си, улеснявайки работата и увеличавайки производителността.
В наши дни роботиката е една от най -прогресивните технологии, достигнала безпрецедентни висоти в своето развитие благодарение на интелектуалната дейност на цели поколения изобретатели, дизайнери, инженери и техници.
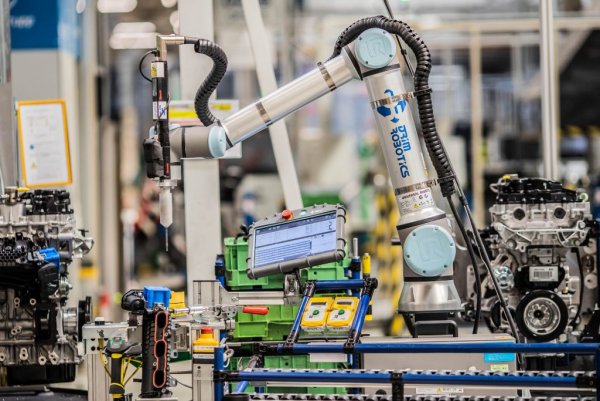
Производство на 3-цилиндров двигател в завода на Opel
Имитации на хора и животни
Поглеждайки в миналото (и в крайна сметка в настоящето), не може да се избегне впечатлението, че хората настоятелно искат да създадат изкуствено създание, което автоматично да извършва скучни, трудни, опасни или нежелани действия за него.
Развитието на механизацията, автоматизацията и роботиката протича постепенно. С развитието на технологиите се появяват първите имитации на хора или механични форми на животни. Примери за механични имитации на животни са дадени в литературата преди началото на нашата ера.
Геният на Ренесанса Леонардо да Винчи (1495) се свързва със създаването на механичния рицар. Известни са и механични имитации на хора (андроиди) от швейцарските майстори Жакет-Дроз (18 век). Техният автоматичен писар (калиграф) успя да напише няколко изречения с химикалка и имитира много добре човек.

Механичен робот «Калиграф» от часовникаря Пиер Жаке-Дроз (1772)
След ерата на механиката, електротехниката, а след това и компютърните технологии, допринесоха за развитието на роботи. 1920 г. е крайъгълен камък в роботиката.
Роботите на Чапек като същества с изкуствен интелект
През 1920 г. Карел Чапек пише пиеса „RUR“ с подзаглавие „Универсалните роботи на Росум“. Премиерата на пиесата се състоя в началото на 1921 г. и за първи път в нея беше използвана думата „робот“, която стана позната на всички езици по света.Книгата RUR е преведена на повече от тридесет езика, включително есперанто.
Миналата година думата „робот“ беше на 100 години, а тази година се навършват 100 години, откакто се играе първата пиеса „RUR“ на Карел Чапек.
Корица на книгата на научнофантастичната пиеса „RUR“, написана от Карел Чапек през 1920 г.
Думата робот е може би единствената чешка дума, която се използва по целия свят в неизкривена форма. Той придоби такава популярност, че по -късно Карел Чапек намери за подходящо да заяви, че истинският „изобретател“ на думата „робот“ е неговият брат Йозеф.
Първоначално Карел искаше да използва думата „труд“ от английския „труд“ за героите в играта RUR. И така, днес имаме думата робот, използвана във всяка научна фантастика, свързана с типично славянската дума робот.
Роботите на Чапек не са механичен заместител на хората, те са изкуствени същества, създадени от синтетична органична материя и притежаващи човешки интелект. Всъщност те са същите като съвременните съвременни андроиди, киборги и репликанти.
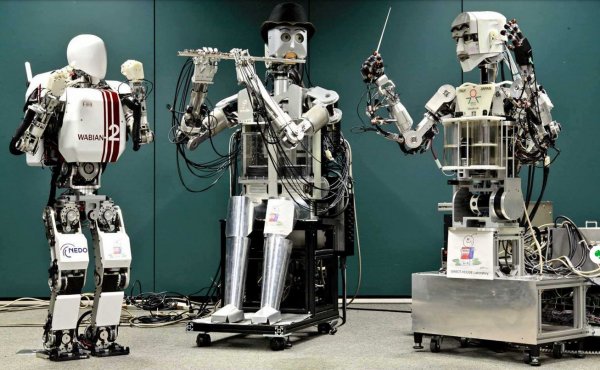
Проект WABOT-HOUSE (2002)
Определение на робот и роботика
Както е обичайно в науката и технологиите, е необходимо да се определи значението на думата робот.Първоначално роботът се е разбирал като проста машина, вижте например Британската енциклопедия от 1947 г., която дава жироскопичен стабилизатор за хода на самолет или кораб като пример за робот.
През 1941 г. писателят Исак Азимов пръв използва думата роботика и формулира три основни закона на роботиката, които представляват основните изисквания за разработването и използването на роботи.

Законите на роботиката на Исак Азимов
Роботът най-често се разбира като компютърно управлявана интегрирана система, способна автономно и целенасочено да взаимодейства с реална среда в съответствие с инструкциите на човека.
Това определение се допълва от други условия, които определят определението за робот, например способността да възприема и разпознава околната среда, да общува с хората на изкуствен или естествен език и т.н.
Робототехниката като научна и техническа дисциплина е науката за роботите, техния дизайн, производство и приложение. Робототехниката е тясно свързана с електрониката, механиката и софтуера.
Условия и определения: Роботи и роботизирани устройства
Изглежда, че крайната цел на роботиката наистина е да се изгради машина, която почти ще замени хората, включително техния интелект.
През 1997 г. компютър победи действащия световен шампион по шах. През същата година е създадено международното състезание RoboCup със следната цел (мечта) в преамбюла: „До средата на 21 -ви век единадесет напълно автономни хуманоиди ще победят действащия футболен шампион според официалните правила на ФИФА“. Целта изглежда глупава, но, както в случая с завладяването на Луната, пътят към тази цел може да има редица „вторични“, но значителни резултати.

RoboCup (2017)
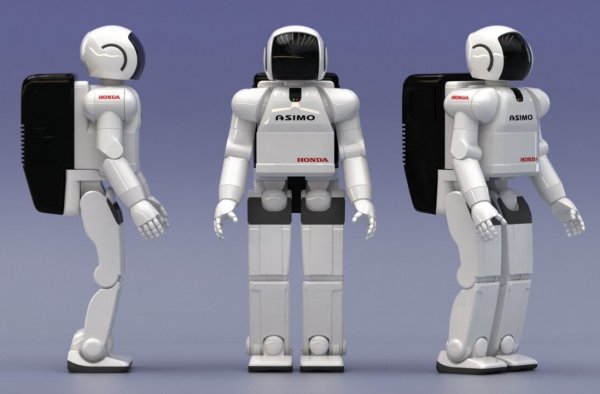
Хуманоидният робот ASIMO се използва предимно за рекламни цели и за популяризиране на роботиката
Хуманоиден робот (андроид) е робот с човешка форма. Тъй като много роботи в научната фантастика изглеждат човешки, хуманоидният робот може да бъде роботът по подразбиране за повечето хора.
От друга страна, не може да се твърди, че всички роботи, които трябва да изпълняват някои задачи в реалния свят, задължително трябва да бъдат хуманоидни роботи, например самолетите също не приличат на птици. Необходимите функции за робота трябва да определят оптималния му вид.
Индустриални роботи
Един от тези резултати, без които, по -специално, вече е невъзможно да си представим производството на автомобили, са индустриалните роботи, чието определение вече е дадено, ISO 8373: 2012, в общ превод: „промишлен робот: Автоматично управление , препрограмиран, преконфигурируем манипулатор, програмируем в три или повече степени на движение, който може да бъде или постоянно инсталиран, или преместен за приложения за индустриална автоматизация. «
Първите индустриални роботи, Unimate и Versatran, са построени и въведени в експлоатация в САЩ между 1960 и 1962 г. Това бяха сравнително тежки машини с малък брой управлявани оси с хидравлични и електро-хидравлични задвижвания. Тяхното програмиране и управление се основаваха на аналогова технология.

NServth истински в историятапотребителски интерфейс индустриален робот Unimate
Първият индустриален робот, използващ микропроцесор за управление, се появява през 1974 г. В Европа това е успешният робот Asea IRB 6.
Роботът имаше манипулатор под формата на антропоморфна конструкция на рамото, пет управляеми оси с електрически задвижвания и товароносимост от 6 кг. Въпреки сравнително простата концепция за управление, той може да се използва и за дъгово заваряване и повърхностна обработка. Този робот се произвежда от 1975 до 1992 г., като са произведени общо почти 2000 броя.

Индустриални роботи ASEA (отляво надясно: IRB 6, IRB 2000, ABB IRB 3000, ABB S3 контролен шкаф)

Робот ASEA IRB 6 върху шведска пощенска марка от 1984 г.
През следващите години механиката на индустриалните роботи се подобрява и се разширява продуктовата гама, особено товароподемността — от роботи за работа с малки части до роботи с товароподемност около 1000 кг.
Индустриалните роботи също започнаха да се оборудват с компютърно зрение и други интелигентни сензори. Голяма промяна обаче настъпи в начина на управление и програмиране, което позволява използването на 3D CAD техники и програмирането на взаимодействащи роботи.
Последната тенденция е съвместни индустриални роботи (коботи), които осигуряват контакт човек-робот и спазват първия закон на роботиката „роботът не трябва да вреди на човек“. Промяна е настъпила и в начина на управление и програмиране, което позволява използването на 3D CAD методи и програмиране на взаимодействащи роботи.
Според статистиката на Международната федерация по роботика само през 2018 г. са пуснати в експлоатация 76 000 нови промишлени роботи.

Модерен съвместен робот Cobot UR5. Благодарение на техните сензори, съвместните роботи (коботи) могат да взаимодействат директно и безопасно с хората.
Повече за съвременните индустриални роботи:
Класификация на индустриалните роботи
Гарантиране на безопасността при използване на индустриални роботи
Индустриалните роботи и ползите от внедряването им в производството, значимостта на роботиката
Роботи и изкуствен интелект
Но да се върнем към нашата цел да заменим хората с машини. През 60 -те години на миналия век в американските университети са създадени първите лаборатории за изкуствен интелект, а през 1968 г. в Станфордския изследователски институт е създаден първият интелигентен мобилен робот на колела Shakey, оборудван с компютърно зрение, който е в състояние да разпознае околната среда и да се движи целенасочено в то.

Shakey Robot (1968)
През 1973 г. първият модерен хуманоид Wabot-1 е изстрелян в Япония в университета Waseda. На Експо 85 Vabot свири на електронен орган, а на 22 август 2003 г. японският хуманоиден робот Asimo (ASIMO) поднесе цветя в Прага на бюста на Карел Чапек.
Създаден е роботът на Асимо v 2000 инча Waco Fundamental Research Center в Япония от Honda Corporation и дълго време той беше най -известният хуманоиден робот в света.

Робот WABOT-1 (1973)

Робот WABOT-2 (1984)

Роботът на Асимо донесе хризантеми до бюста на създателя на думата „робот“, чешкия писател Карел Чапек (2003)
В днешно време има голям брой обслужващи роботи като роботизирани прахосмукачки, косачки, роботизирани доилни машини и много други устройства, базирани на постиженията на роботиката.
От роботиката дойде интердисциплинарното инженерно поле — мехатрониката, тъй като много иновативни решения първо бяха измислени и внедрени при създаването на роботи, а след това започнаха да се използват в други машини и механизми.
Думата „мехатроника“ е използвана за първи път от Текуро Мори, инженер в японската компания Yaskawa, през 1969 г. Мехатрониката е стремеж към пълна интеграция на механика, електрически машини, електроника, микропроцесори и софтуер.
За повече информация относно мехатрониката вижте тук:Какво е мехатроника, мехатронни елементи, модули, машини и системи