Какво е синхронно въртене
Скоростта на ротора, с която работи асинхронен двигател, зависи от честотата на захранващото напрежение, от мощността на токовото натоварване на вала и от броя на електромагнитните полюси на дадения двигател. Тази реална скорост (или работна честота) винаги е по-малка от така наречената синхронна честота, която се определя само от параметрите на източника на захранване и броя на полюсите на намотката на статора на този асинхронен двигател.

Поради това, синхронни обороти на двигателяАз съм Дали честотата на въртене на магнитното поле на намотката на статора е при номиналната честота на захранващото напрежение и се различава леко от работната честота. В резултат на това броят на оборотите в минута под товар винаги е по-малък от така наречените синхронни обороти.
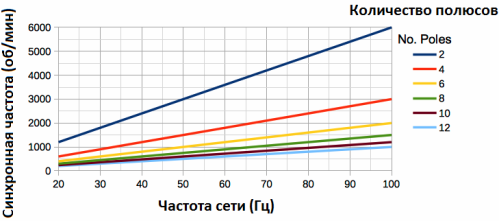
Фигурата показва как честотата на синхронното въртене за асинхронен двигател с един или друг брой полюси на статора зависи от честотата на захранващото напрежение: колкото по -висока е честотата, толкова по -голяма е ъгловата скорост на въртене на магнитното поле. Така например в задвижвания с променлива честота промяна на честотата на захранващото напрежение промяна на синхронната честота на двигателя. Това също променя работната скорост на ротора на двигателя под товар.

Обикновено намотката на статора на асинхронния двигател се захранва с трифазен променлив ток, който създава въртящо се магнитно поле. И колкото повече двойки полюси — толкова по -ниска ще бъде честотата на синхронното въртене — честотата на въртене на магнитното поле на статора.
Повечето съвременни асинхронни двигатели имат от 1 до 3 двойки магнитни полюси, в редки случаи 4, защото колкото повече полюси, толкова по -ниска е ефективността на асинхронния двигател. Въпреки това, с по -малко полюси, скоростта на ротора може да се променя много, много плавно чрез промяна на честотата на захранващото напрежение.
Както бе отбелязано по -горе, реалната работна честота на асинхронния двигател се различава от неговата синхронна честота. Защо се случва? Когато роторът се върти с честота, по -малка от синхронната, тогава проводниците на ротора преминават магнитното поле на статора с определена скорост и в тях се индуцира ЕМП. Тази ЕРС създава токове в затворените проводници на ротора, в резултат на което тези токове взаимодействат с въртящото се магнитно поле на статора и възниква въртящ момент — роторът се отнася от магнитното поле на статора.

Ако моментът има достатъчна стойност за преодоляване на силите на триене, тогава роторът започва да се върти, докато електромагнитният момент е равен на спирачния момент, който се създава от товара, силите на триене и т.н.
В този случай роторът изостава през цялото време от магнитното поле на статора, работната честота не може да достигне синхронната честота, тъй като ако това се случи, тогава ЕРС ще престане да се индуцира в проводниците на ротора и въртящият момент просто няма да се появи . В резултат на това за моторния режим стойността „приплъзване“ (фиш s, като правило е 2-8%), във връзка с което е вярно и следното неравенство на двигателя:

Но ако роторът на същия асинхронен двигател се завърти с помощта на някакво външно задвижване, например двигател с вътрешно горене, до такава скорост, че скоростта на ротора надвишава синхронната честота, тогава ЕРС в проводниците на ротора и активният ток в тях ще придобие определена посока и асинхронният двигател ще се превърне в генератор.
Общият електромагнитен момент се оказва забавен, приплъзването s става отрицателно.Но за да може режимът на генератора да се прояви, е необходимо да се захранва асинхронният двигател с реактивна мощност, която би създала магнитно поле на статора. В момента на стартиране на такава машина в режим генератор може да е достатъчна остатъчната индукция на ротора и кондензаторите, които са свързани към трите фази на намотката на статора, захранващи активния товар.