Интуитивен метод за проектиране на схеми за управление
 Интуитивен метод — метод за разработване на схеми за управление въз основа на опита, натрупан в различни проектантски организации в автоматизацията на различни механизми. Тя се основава на инженерната интуиция на дизайнера.
Интуитивен метод — метод за разработване на схеми за управление въз основа на опита, натрупан в различни проектантски организации в автоматизацията на различни механизми. Тя се основава на инженерната интуиция на дизайнера.
Само този, който е усвоил целия предишен опит и има определени способности по отношение на съставянето на схеми, който може да мисли абстрактно и да разсъждава логично, може перфектно да овладее този метод. Въпреки сложността си, повечето електрически дизайнери използват интуитивния метод широко.
Например, помислете за опростена кинематична диаграма на лоста за натискане (фиг. 1). Когато колелото 5 се върти по часовниковата стрелка, лостът 4 завърта лоста 1 около оста О, като по този начин принуждава обувката 3 с лоста 2 да се превежда. При по -нататъшно завъртане на колелото 5 посоката на движение на лоста 1 се променя и обувката се връща в първоначалното си положение, след което двигателят трябва да спре.
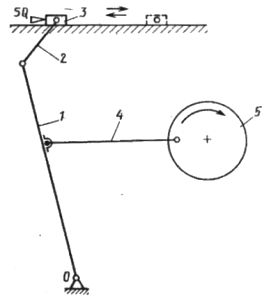
Ориз. 1. Схематична схема на управлението на тласкача на лоста
Разглежданият механизъм е типичен представител на бутащо устройство. В първия цикъл механизмът е включен и работи. Във втората мярка не работи. Цикълът, в който механизмът не работи, се нарича нула. Въпреки че обувката е напълно бутална (напред и назад), за задвижването може да се използва нереверсивен електродвигател.
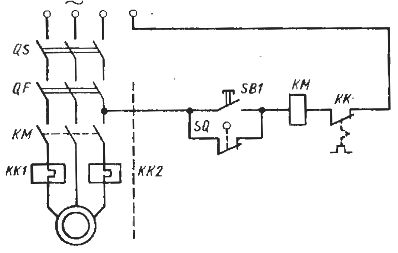
Контролната верига на лостовия бутален електродвигател се състои от две части (на фиг. 1 те са разделени с пунктирана линия): захранващата верига и управляващата верига.
Помислете за предназначението на елементите на силовата верига. Трифазният ток се подава към превключвателя QS, който прекъсва захранването на електродвигателя в случай на ремонт или повреда на магнитния стартер. Тогава токът преминава през прекъсвача, чието освобождаване на QF е показано на диаграмата. Той е предназначен за защита и изключване на захранването на задвижването в случай на токове на късо съединение. Основните контакти на магнитния стартер KM включват или изключват намотката на електродвигателя М.
Термичните релета KK1 и KK2, нагревателните елементи на които са показани в силовите вериги, са предназначени да предпазват електродвигателя от продължителни претоварвания:
Схемата за управление работи по следния начин. Когато натиснете бутона за стартиране SB1, бобината на магнитния стартер KM се захранва и следователно контактите на захранващата верига на KM се затварят и електрически ток влиза в намотката на двигателя. Роторът на двигателя е въртян и барабанът започва да се движи напред. В същото време той се отдалечава от лоста на крайния превключвател SQ и контактите му са затворени.
Когато бутонът за стартиране SB1 се освободи и контактите му се отворят, KM намотката на магнитния стартер ще получи захранване през контактите на крайния превключвател SQ. След като се придвижи напред, а след това назад, буталото ще натисне лоста на крайния превключвател SQ, контактите му ще се отворят и намотката на KM ще се изключи. Това ще доведе до отваряне на контактите на КМ в силовата верига и спиране на електродвигателя.
Разглежданата верига съдържа захранващи и управляващи вериги. В бъдеще ще се разглеждат само схеми за контрол.
По функция, т.е. по предназначение, всички елементи, участващи в работата на веригата, могат да бъдат разделени на три групи: управляващи контакти, междинни елементи и изпълнителни елементи.
Контролните контакти са елементите, с които се издават команди (бутони за управление, превключватели, крайни превключватели, първични преобразуватели, релейни контакти и др.).
Самото име на междинните елементи показва, че те заемат междинна позиция между контролните и изпълнителните елементи. В релейно -контактните вериги те включват времеви релета и междинни релета, а в безконтактни вериги — логически порти.
Изпълнителните елементи са изпълнителни механизми. При разработването на вериги за управление обаче не се използват самите задвижващи механизми (електродвигатели или нагревателни елементи), а устройствата, които ги включват, т.е. магнитни стартери, контактори и т.н.
Всички управляващи контакти, според техния функционален принцип, са разделени на пет типа: стартов контакт с краткотрайно действие (PC), стартов контакт с продължително действие (PD), спиране на контакт с краткосрочно действие (OK), спиране контакт с продължително действие (OD), контакт старт-стоп (софтуер). Тези контакти се наричат основните.
Циклограмите на работата на всички типични контакти при управление на циклични механизми са показани на фиг. 2.
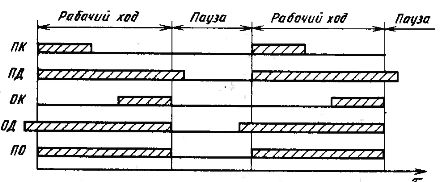
Ориз. 2. Циклограма на управляващите контакти
Всеки от петте контакта започва работа (затваря) и приключва (отваря) в определени моменти от времето. И така, стартовите контакти започват своята работа заедно с началото на работния ход, но контактът YAK прекратява работата си по време на работния ход, OD — по време на паузата, тоест те се различават един от друг само в моментите на превключване изключен (отваряне).
Спиращите контакти, които, за разлика от стартиращите контакти, прекратяват работата си едновременно с края на работния ход, се различават в моментите на включване (затваряне). Спиращият контакт OK започва своята работа по време на работния ход, а контактният OD — по време на паузата. Само контактът на софтуера започва своята работа заедно с началото на работния ход и завършва с неговия край.
С помощта на разглежданите пет основни контакта е възможно да се получат четири схеми за управление на изпълнителни и междинни елементи, които се наричат типични схеми (фиг. 3).

Ориз. 3. Типични схеми за управление за изпълнителни и междинни вериги
Първата типична верига (фиг. 3, а) има само един софтуерен контакт за управление. Ако е затворен, тогава през задвижващия механизъм X протича електрически ток, а ако е отворен, ток няма. PO контактът има свое значение и всички останали контакти трябва да се използват по двойки (старт и стоп).
Втората типична верига има два управляващи контакта с продължително действие: PD и OD (фиг. 3, б).
Третата типична верига се състои от стартовия контакт на компютъра и контакта за спиране на OD, в допълнение към контролните контакти, тази верига трябва да включва блокиращ контакт x, чрез който задвижващият механизъм X ще продължи да получава захранване след отваряне на контакта за стартиране на компютъра ( Фиг. 3, в).
Четвъртата типична схема се основава на два краткосрочни контакта: стартиране на компютър и спиране на OK, свързани паралелно (фиг. 3, г).
Дадените четири типични схеми позволяват (сякаш от кубчета) да съставят сложни паралелно-последователни схеми за управление на контакти. Така, например, разглежданата схема за управление на лоста (виж фиг. 1) се основава на четвъртата типична схема. Той използва задействащите бутони SB1 като краткосрочен стартов контакт и SQ крайния превключвател като краткосрочен контакт за спиране.
При съставяне на схема за управление по интуитивен метод е необходимо правилно да се определи вида на контролния контакт, тоест продължителността на неговото действие.
Помислете за пример за разработване на схема за управление, използвайки интуитивен метод, използващ типични схеми.
Нека бъде необходимо да се разработи полуавтоматично устройство за управление на индуктор и устройство за пръскане на инсталация, предназначена за нагряване на продукт с високочестотни токове и след това охлаждането му с водни струи. Времето за нагряване на продукта в индуктора е 12 s, а времето за охлаждане е 8 ч. Продуктът се инсталира ръчно в индуктора.
Първо ще анализираме работата на полуавтоматичното устройство и ще определим всички изпълнителни и междинни елементи. Работникът ръчно инсталира продукта в индуктора и натиска бутона за стартиране. В този момент индукторът се включва и нагряването на продукта започва. В същото време релето за време също трябва да се включи, отчитайки времето за нагряване (12 s).
Това реле за време (по -точно неговите контакти) изключва индуктора и включва устройството за пръскане, което подава вода за охлаждане. В същото време трябва да се включи второ реле, за да се отброи времето за охлаждане, тоест да се изключи разпръскващото устройство. По този начин е необходимо да се управляват четири елемента: индуктор, спрей устройство и две времеви релета.
Индукторът се включва и изключва чрез контактор, поради което е необходимо последното да се управлява. Разпръскващото устройство се управлява от електромагнитен вентил.
Нека обозначим намотката (намотката) на контактора KM1, намотката на електромагнитния вентил KM2 и намотките на релето за време, съответно KT1 и K.T2. По този начин имаме два задвижващи механизма: KM1 и KM2 и два междинни елемента: KT1 и KT2.
От извършения анализ следва, че първо трябва да започне нагряването, тоест намотката KM1 ще бъде възбудена. Бутонът за задействане на SB (кратко действие) се използва като стартов контакт. По този начин е приложима или третата, или четвъртата типична схема.
Нека индукторът да бъде изключен от контактите на релето за време KT1.1, които в този случай са контакти с продължително действие. Затова избираме третата типична схема. Едновременно с намотката на магнитния стартер KM1 е необходимо да се включи релето за време KT1, което е много лесно да се направи, като се свържат паралелно.
Помислете за работата на получената верига (фиг. 4, а).
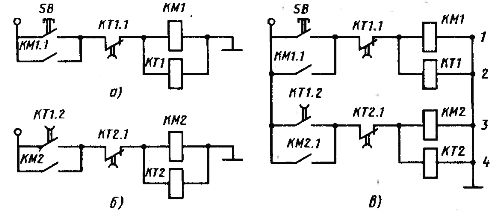
Ориз. 4. Контролни вериги: а — индуктор и реле за време на нагряване, б — пръскащо устройство и време на охлаждане на релето, в — инсталация като цяло
Когато натиснете бутона за стартиране SB бобината на контактора KM1 се захранва, тоест нагряването на продукта започва. В същото време бобината на релето за време KT1 се захранва и започва отброяването на времето за нагряване. С помощта на блокиращия контакт KM1.1, напрежението на бобината KM1 ще се поддържа дори след освобождаване на бутона за задействане на SB, т.е. след отваряне на контактите му.
След като времето за нагряване изтече, релето за време KT1 ще заработи, неговият контакт KT1.1 ще се отвори. Това ще доведе до изключване на бобината KM1 (загряването на продукта ще приключи). Сега пръскащото устройство трябва да бъде включено. Тя може да бъде включена от релето за време KT1 чрез затваряне на контакта. При включване на пръскащото устройство релето за време KT1 се изключва. Следователно затварящият контакт KT1.1 ще бъде краткосрочен контакт. Затова отново ще използваме третата типична схема.
Едновременно с пръскащото устройство е необходимо да се включи релето за време KT2, което отброява времето за охлаждане. За тази цел ще използваме приложената техника и ще включим бобината на релето за време KT2 успоредно на бобината KM2. Така получаваме втората схема за управление (фиг. 4, б). Комбинирайки двете вериги (фиг. 4, а и б), получаваме обща схема за управление (фиг. 4, в).
Нека сега разгледаме работата на веригата като цяло (фиг. 4, в). Когато натиснете бутона за стартиране на SB, бобините на контактора KM1 и релето за време KT1 се захранват и продуктът започва да загрява. След 12 s релето за време KT1 ще заработи и контактите му във верига 1 ще се отворят, а във верига 2 ще се затворят. Продуктът ще започне да се охлажда. Едновременно с бобината KM2 на електромагнитния клапан, релето за време K ще бъде захраненоT2, отброявайки времето за охлаждане.Когато контактът KT2.1 (верига 3) се отвори, клапанът KM2 и релето за време KT2 се изключват и веригата се връща в първоначалното си положение.
Получената схема за управление на индуктора и пръскачката е разработена по интуитивен метод. Няма обаче доказателства, че тази схема ще бъде правилна и оптимална. Въпросът за работоспособността на веригата може да бъде решен само след нейното производство и внимателна експериментална проверка. Точно това е най -големият недостатък на интуитивния метод. Отбелязаният недостатък липсва в аналитичния метод. Аналитичният метод за разработване на схеми за контрол ще бъде разгледан в следващата статия.