Принципи на автоматично управление на стартиране и спиране на електродвигатели
В статията се разглеждат релейно-контакторни схеми за автоматизация на стартиране, обратно и спиране на асинхронни двигатели с фазов ротор и DC двигатели.
Помислете за схемите за включване на стартовите съпротивления и контактите на контакторите KM3, KM4, KM5, които ги управляват, при стартиране асинхронен двигател с навит ротор (AD с f. R.) И DC двигател с независимо възбуждане DPT NV (фиг. 1). Тези схеми предвиждат динамично спиране (фиг. 1, а) и противоположно спиране (фиг. 1, б).

При стартиране на реостат на DPT NV или IM с фазов ротор, алтернативно затваряне (късо съединение) на етапите на пусковия реостат R1, R2, R3 се извършва автоматично, като се използват контактите на контакторите KM3, KM4, KM5, които могат се контролира по три начина:
-
чрез отчитане на интервали от време дt1, дt2, дt3 (фиг. 2), за който се използват времеви релета (управление по време);
-
чрез наблюдение на скоростта на електродвигателя или ЕМП (контрол на скоростта). Като датчици за ЕМП се използват релета за напрежение или контактори, директно свързани чрез реостати;
-
използването на токови сензори (токови релета, регулируеми за възвръщаем ток, равен на Imin), даващ команден импулс, когато токът на котвата (ротора) намалява по време на процеса на стартиране до стойността на Imin (управление на принципа на тока).
Помислете за механичните характеристики на DC двигател (DCM) (фиг. 1) (за асинхронен двигател (IM), същото е, ако използвате работната секция на механичната характеристика) по време на стартиране и спиране, както и кривите на скоростта, въртящия момент (ток) спрямо времето.
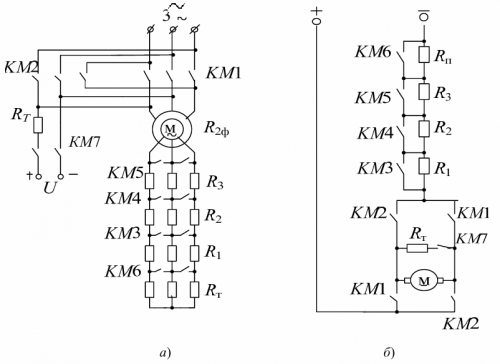
Ориз. 1. Схеми за включване на стартовите съпротивления на асинхронен двигател с фазов ротор (а) и DC двигател с независимо възбуждане (б)
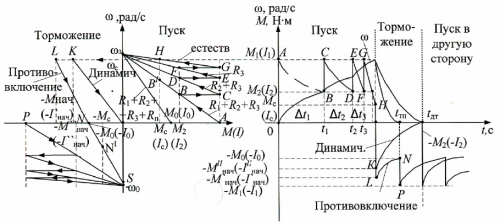
Ориз. 2. Характеристики на стартиране и спиране (а) и зависимости на DPT (б)
Стартиране на електродвигателя (контактите KM1 са затворени (фиг. 1)).
При подаване на напрежение токът (въртящият момент) в електродвигателя е равен на I1 (M1) (точка А) и двигателят се ускорява със съпротивление при стартиране (R1 + R2 + R3).
С напредването на ускорението токът намалява и при ток I2 (точка В) R1 е късо съединение, токът се увеличава до стойността I1 (точка С) и т.н.
В точка F, при ток I2, последният етап на стартовия реостат е късо съединен и електродвигателят достига своята естествена характеристика (точка G). Ускорение се случва до (точка Н), което съответства на тока Ic (зависи от натоварването). Ако R1 не е късо съединение в точка B, тогава електродвигателят ще се ускори до точка B’ и ще има постоянна скорост.
Динамично спиране (отворен KM1, затворен KM7), докато електродвигателят отива в точка K, която съответства на момента (тока) и стойността му зависи от съпротивлението Rtd.
Спиране чрез опозиция (отворено KM1, затваряне на KM2), докато електрическият мотор отива в точка L и започва да се забавя много бързо със съпротивление (R1 + R2 + R3 + Rtp).
Наклонът на тази характеристика, а оттам и стойността, е същият (успореден) на началната характеристика с съпротивлението (R1 + R2 + R3 + Rtp).
В точка N е необходимо късо съединение Rtp, електродвигателят отива в точка P и ускорява в обратна посока. Ако Rtp не е късо съединение в точка N, тогава електродвигателят ще се ускори до точка N ‘и ще работи с тази скорост.
Схеми за автоматично управление за стартиране на DPT
Управление като функция на времето (Фиг. 3) Най -често електромагнитните релета за време се използват като реле за време в ЕР вериги. Те са настроени да отчитат предварително зададените времеви закъснения dt1, dt2,…. Всяко времево реле трябва да включва съответния захранващ контактор.

Ориз. 3. Схема за автоматично стартиране на DPT като функция на времето
Контролът като функция на скоростта (най -често се използва за динамично спиране и противоположно спиране) Този принцип на автоматизация на управлението включва използването на релета, които пряко или косвено контролират скоростта на електродвигателя: за двигатели с постоянен ток се измерва ЕРС на котвата, за асинхронни и синхронни електродвигатели, се измерва ЕМП или честотата на тока.
Използването на устройства, които измерват директно скоростта (реле за контрол на скоростта (RCC) на сложно устройство), усложнява монтажната и управляващата верига. RKS се използва по -често за управление на спирането, за да се изключи електродвигателят от мрежата при скорост, близка до нула. По -често се използват косвени методи.
При постоянен магнитен поток ЕМП на котвата на DPT е правопропорционална на скоростта. Следователно намотката на релето за напрежение може да бъде свързана директно към клемите на котвата. Напрежението на клемите на котвата Uy обаче се различава от Eya по размера на спада на напрежението в намотката на котвата.
В този случай са възможни два варианта:
- използването на релета за напрежение KV, които могат да се регулират към различни напрежения на задействане (фиг. 4, а);
- използване на КМ контактори, свързани чрез пускови резистори (фиг. 4, б). Затварящите контакти на KV1, KV2 релето подават напрежение към бобините на захранващите контактори KM2, KM3.
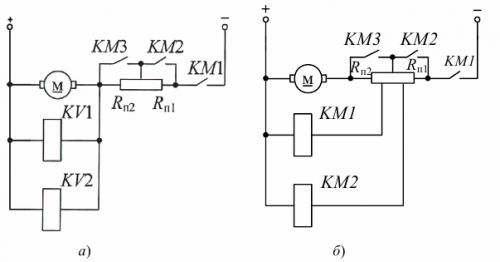
Ориз. 4. Захранващи вериги за свързване на DPT при използване на релета за напрежение (а) и контактори (б) като DCS

Ориз. 5. Електрическа верига (а) и верига за управление (б) DPT с автоматизация при стартиране в зависимост от скоростта. Пунктираните линии показват веригата, когато за измерване на напрежението се използват релета за напрежение KV1, KV2.
Управление в текущата функция. Този принцип на управление се реализира с помощта на релета с подток, които включват силовите контактори, когато токът достигне стойността I1 (фиг. 6, б). Най -често се използва за стартиране до повишена скорост с отслабване на магнитния поток.
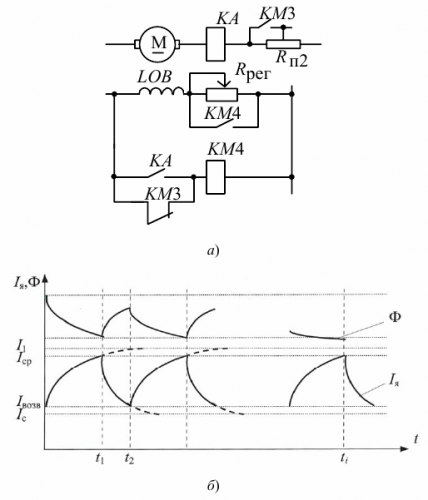
Ориз. 6. Схема на свързване (а) и зависимост на Ф, Iя = f (t) (б) при стартиране на DC двигател в зависимост от тока
Когато пусков ток (Rp2 е късо), KA релето се задейства и захранването се подава към намотката KM4 през KA контакта. Когато токът на котвата намалее до обратния ток, контакторът KM4 се изключва и започва намаляване на магнитния поток (Rreg се въвежда във веригата за намотка на полето LOB). В този случай токът на котвата започва да се увеличава (скоростта на промяна на тока на котвата е по -висока от скоростта на промяна на магнитния поток).
При достигане на Iya = Iav в точка t1 се задействат релета KA и KM4 и Rreg се манипулира. Процесът на увеличаване на потока и намаляване на Iа ще започне до момента t2, когато космическият кораб и KM4 се изключат. С всички тези комутации M> Ms и електродвигателят ще се ускорят. Процесът на стартиране приключва, когато величината на магнитния поток се доближи до зададената стойност, определена от въвеждането на съпротивлението Rreg във веригата на намотката на възбуждане и когато при следващото изключване на KA, KM4, токът на котвата не достигне Iav (точка ти). Този принцип на управление се нарича вибрационен.
Автоматизация на DPT спирачното управление
В този случай важат същите принципи, както при автоматизацията при стартиране. Целта на тези вериги е да изключат електродвигателя от мрежата със скорост, равна или близка до нула. Най -лесно се решава с динамично спиране, като се използват принципите на времето или скоростта (фиг. 7).
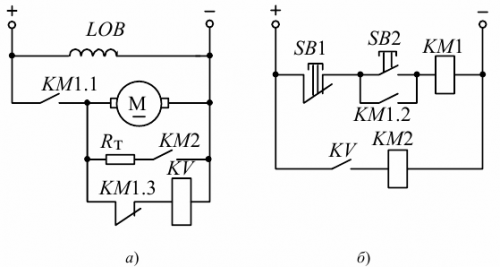
Ориз. 7. Електрическа верига (а) и верига за управление (б) динамично спиране
При стартиране натискаме SB2 и напрежението се подава към намотката KM1, докато: бутонът SB2 (KM1.2) се манипулира, напрежението се прилага към арматурата на двигателя (KM1.1), захранващата верига KV (KM1.3 ) се отваря.
При спиране натискаме SB1, докато котвата е изключена от мрежата, KM1.3 се затваря и KV релето се активира (тъй като в момента на изключване тя е приблизително равна на Uc и намалява с намаляване на скоростта). Напрежението се подава към бобината KM2 и RT се свързва с котвата на двигателя. Когато ъгловата скорост е близо до нула, котвата на KV релето изчезва, KM2 се обезвъздушава и RT се изключва. KV релето в тази верига трябва да има възможно най -ниския възвратен коефициент, тъй като само в този случай е възможно да се постигне спиране до минималната скорост.
Когато електродвигателят е обърнат, се използва спиране с контра-превключване и задачата на управляващата верига е да въведе допълнителен етап на съпротивление, когато се подаде командата за заден ход и да го заобиколи, когато скоростта на електродвигателя е близка до нула. Най -често за тези цели контролът се използва като функция на скоростта (фиг. 8).

Ориз. 8. Електрическа верига (а), управляваща верига (б) и спирачни характеристики (в) на спиране чрез противоположно DPT
Помислете за верига без блок за автоматизация при стартиране. Оставете електродвигателя да работи «напред» по естествена характеристика (включвайки KM1, ускорението не се взема предвид).
Натискането на бутона SB3 изключва KM1 и включва KM2. Променя се полярността на напрежението, приложено към котвата. Контактите KM1 и KM3 са отворени, импедансът се въвежда във веригата на котвата. Появява се пусков ток и електродвигателят преминава към характеристика 2, според която се извършва спиране. При скорост, близка до нула, релето KV1 и контакторът KM3 трябва да се включат. Етапът Rpr се манипулира и ускорението започва в обратна посока съгласно характеристика 3.
Характеристики на вериги за управление на асинхронни двигатели (IM)
1. Релетата за управление на скоростта на индукцията (RKS) често се използват за управление на спирането (особено противоположни).
2. За IM с навит ротор се използват релета за напрежение KV, които се задействат от различни стойности на ЕРС на ротора (фиг. 9). Тези релета се включват чрез токоизправител, за да се изключи влиянието на честотата на тока на ротора върху индуктивното съпротивление на бобините на самото реле (с промяна в XL промени и Iav, Uav), намаляване на коефициента на възвръщаемост и увеличаване на надеждността на работа.

Ориз. 9. Схема на спиране чрез противоположно кръвно налягане
Принцип на действие: при висока ъглова скорост на ротора на електродвигателя ЕМП, индуцирана в намотките му, е малка, тъй като E2s = E2k · s, а приплъзването s е незначително (3–10%). Напрежението на релето KV не е достатъчно, за да се изтегли котвата му. При заден ход (KM1 се отваря и KM2 се затваря), посоката на въртене на магнитното поле в статора се обръща. Релето KV работи, отваря захранващата верига на контакторите KMP и KMT, а в веригата на ротора се въвеждат стартиращите Rп и спирачните Rпр съпротивления. При скорост, близка до нула, KV релето се изключва, KMT се затваря и електродвигателят ускорява в обратна посока.