Електрически вериги за управление на задвижване
 В зависимост от скоростта на пътническите асансьори се приемат следните видове вериги за управление на мощността:
В зависимост от скоростта на пътническите асансьори се приемат следните видове вериги за управление на мощността:
-
нискоскоростните асансьори имат катерици или фазови роторни двигатели и бутон или лост за управление,
-
високоскоростни асансьори-дву или едноскоростни двигатели, управлявани от магнитни станции или тиристорни контролни станции (TSU-R) с бутони за управление,
-
високоскоростни и високоскоростни асансьори — DC двигатели, управлявани от системата «генератор — двигател» с различни схеми на възбуждане или от системата «тиристорен преобразувател — мотор» с бутони,
-
могат да се използват и вериги от асинхронни клапанни каскади (AVK), чието използване дава възможност за повишаване на ефективността. инсталация.
Пътническите асансьори, в зависимост от пътническия поток, височината на повдигане и броя на асансьорите, обслужващи пътниците, се разделят на единичен и групов контрол.
Единичните включват:
а) асансьори, работещи по единични поръчки и обаждания, без да преминават спирки по време на спускане и изкачване на пътници,
б) асансьори с качване на пътници при спускане, но със забрана за обаждания при изкачване,
в) същото, но с регистриране на повиквания при спускане с последващото им изпълнение.
Групово управляваните асансьори включват:
а) асансьори с един бутон за повикване на местата за кацане, независимо от броя на монтираните асансьори (по -често се използва сдвоен контрол) и с качване на пътници при спускане,
б) същото, но с пълната колекция от пътници на междинните етажи за изкачване и слизане (обикновено инсталирани в административни, учебни и други сгради).
Освен това много често се използва изпращането на асансьори в редица къщи и цели квартали, когато състоянието на веригите се следи от една диспечерска конзола и се контролират няколко асансьора.
Независимо от скоростта на асансьорите, единичен или групов контрол върху тях, необходимите елементи на повечето от техните схеми са както следва:
-
самонастройващи се бутони, лепкави или затварящи се бутони за повикване на кабини и даване на поръчка от кабината,
-
различни сензори за избор и устройства за съвпадение на точното спиране за регистриране на местоположението на кабината и състоянието на електрическите вериги,
-
сензори и блокировки за състоянието на подемните въжета, състоянието на вратите на мината и кабината (отворени или затворени),
-
крайни превключватели за ограничаване на скоростта и степента на натоварване на кабината,
-
индикатори за посоката на движение на автомобила и в някои асансьори наличието на товар в колата.
От тези елементи ще се спрем по-подробно на устройства за съответствие на позицията (PSC), които определят мястото, където кабината в мината трябва да спре, когато се появи повикване или нареждане, и нейното движение нагоре или надолу. Останалите елементи обикновено са различни модификации на крайните превключватели, известни от други курсове.
Структурно устройствата за съответствие на позицията се изпълняват под формата на набор от трипозиционни електромеханични или индуктивни или магнитни (тръстикови) сензори, разположени в мини, със сигнали, излизащи към реле или безконтактен селектор в машинното отделение (CCPs понякога се изпълняват в под формата на централни подови устройства, разположени в машинното отделение) …
Сензорите, разположени в мината, взаимодействат с монтираните в кабината клонове (за електромеханични) или магнитни шунтове (за индуктивни или тръстикови превключватели) и изпращат сигнали към централния етажен блок (стъпаловидно копирно устройство или релеен реле), инсталиран в машинното отделение, и последната предава и управляваща верига — сигнал за изпълнение на получената команда.
По -целесъобразно е да поставите сензорите за сигнали за движението на колата нагоре или надолу по колата (необходими са по -малко проводници) и да инсталирате магнитни шунтове в мините в необходимите точки. В този случай, с цифрово управление, броят на колоните с инсталирани шунтове по вала е равен на броя битове на предавания номер на пода в двоичен или друг код.
Електромеханичните превключватели с три позиции се преместват в едно от положенията, съответстващи на движението на кабината нагоре или надолу, или нейното спиране, чрез къдраво разположение. В този случай, когато колата се движи, контактите на превключвателите на преминалите етажи се включват в едно от крайните положения, подготвяйки се за действието на веригата от обаждания и нареждания, а когато колата спре, превключвателят е се премества в средно положение, като изключва управляващата верига от посочните контактори и по този начин изключва колата да напуска пода при погрешно натискане на бутона за поръчка или повикване.
За да се осигури относително точно спиране на кабината на асансьора, наскоро в техните вериги за управление започнаха да се използват безконтактни индуктивни или контактно запечатани магнитно контролирани (тръстикови) сензори. Тези сензори са инсталирани както в мината, така и в кабината: в мината има сензори за избор (забавяне), а в кабината има сензор за точно спиране. За да взаимодействат със сензорите, фенерна магнитна селективна шунта се поставя върху пилотската кабина, а феромагнитните прецизно-спирателни шънти се поставят в шахтата (на всеки етаж).
Индуктивните сензори се състоят от отворена U-образна магнитна верига с бобина, затворена в корпус. Намотката на изпълнителното реле е свързана последователно с него и към тях се прилага напрежение с променлив ток (U).
При отворена магнитна верига магнитният поток, пресичащ бобината, е малък. Следователно e.m.f. и токът на самоиндукция в проводниците на бобината, както и индуктивното съпротивление (X), причинено от него, практически липсват, така че съпротивлението на бобината е активно (R). Токът в последователно свързани бобини е относително голям; имитира затваряне на контактите в контактната система (релето се включва).
Когато шунтът затваря U-образната магнитна верига, магнитният поток, пресичащ нейната бобина, се увеличава и следователно ЕРС се увеличава. самоиндукция, както и индуктивното съпротивление на бобината, дължащо се на нея. В резултат на това токът в бобините, свързани последователно, намалява, симулирайки отварянето на веригата в контактната система (изпълнителното реле е изключено).
Тръстиловият превключвател е U-образно тяло, в което от едната страна на жлеба са поставени две запечатани стъклени колби с вакуум вътре и контакти, фиксирани върху пружинни плочи, които са свързани към съответните вериги за управление на асансьора. От другата страна на слота има постоянен магнит. Работният елемент на такива сензори е феромагнитен шунт, който преминава през U-образния разрез, когато кабината на асансьора се движи.
Принципът на действие на тези сензори е следният: пружинните сили на контактните пластини на тръстиковите превключватели са насочени така, че ако полето на постоянен магнит не действа върху тях, тогава нормално отворените контакти са отворени, а нормално затворените контакти са затворени, т.е. веригите, към които са свързани тези контакти, ще бъдат отворени или затворени.
Това състояние на тръстиковия превключвател ще бъде, когато феромагнитният шунт е в жлеба на U-образно тяло, тъй като линиите на магнитното поле на постоянния магнит са затворени през шунта.След като шунтът излезе от жлеба, магнитните силови линии се затварят през плочите, преодолявайки тяхното пружиниращо действие, а контактите на тръстиковия превключвател и следователно веригите, към които са свързани, преминават в противоположното състояние.

Като пример, отразяващ основните характеристики на схемите за управление на асансьори, помислете за схемата за управление за единичен асансьор без свързани спирки, показана на фиг. 1. Асансьорът обслужва четири етажа; двускоростен асинхронен двигател М се използва като изпълнителен двигател.
Включването на ниски (Ml) или високи (B) обороти на двигателя се извършва от съответните контактори Ml и B. Посоката на въртене на двигателя се определя от контакторите B и H, забавянето — от допълнителен резистор P, спиране — чрез електромагнитна спирачка ET.
Използва се като ключове за пода безконтактни индуктивни сензори (DTS, DTOV и DTON), свързани последователно с релейните бобини (RIS, RITOV, RITON). TTP сензорите се използват за включване на задвижването на асансьора до висока скорост и за даване на импулс, за да се забави, докато сензорите DTOV и DTON са предназначени за точно спиране на асансьора на нивото на пода на съответния етаж и се поставят върху колата , магнитни шунти за тях са монтирани в вала на вала.
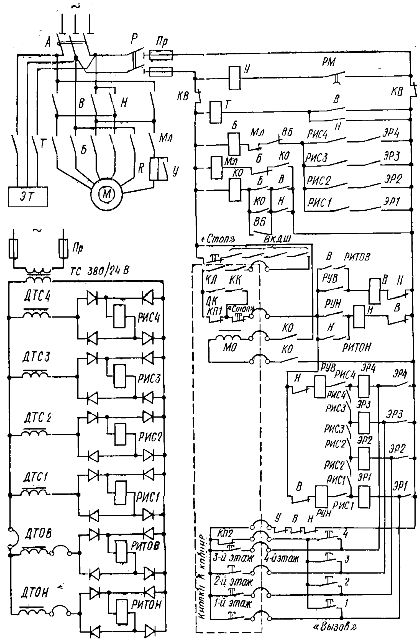
Ориз. 1. Схематична диаграма на единично управление на асансьор
Нека разгледаме предназначението на останалите елементи на веригата и нейната работа, като използваме примера за преместване на кабина с пътник от 1 -ви до 3 -ти етаж, като приемем, че автоматичната машина A, разединителят P и крайните превключватели KB, ограничаващи движението на кабината нагоре и надолу в аварийни режими, са затворени и кабината е на приземния етаж. В този случай бобините на релето RIS, в допълнение към релето на първия етаж, текат от номиналния ток.
При натискане на бутона «3 -ти етаж» се образува следната електрическа верига: фаза на мрежата — полюс на разединителя P — предпазител Pr — краен прекъсвач KB — бутон «Стоп» — заключване на вратите на мината D1 — D4 — контакти за опъване на въжето KK — граница на безопасност превключвател KL — превключватели на вратите на кабината DK — контакти на бутона «Стоп» — отварящ се блок -контакт Н — релейна намотка RUV — затварящи контакти на релета RIS4 и RISZ (бобините на тези релета протичат с ток) — намотката на подово реле ERZ — бутон «3 -ти етаж» — отварящи се блокове — контакти на контактори U, B, N — краен ключ KB — предпазител R — полюс на разединителя P — фаза на мрежата.
След задействане на релето RUV и ER3, контакторът за движение напред B, контакторът за бързо движение B (по веригата на бобината B — блоков контакт ML — високоскоростен превключвател VB — релейни контакти RISZ и ER3) се включват. Когато контактите B и B са затворени, двигателят е свързан към мрежата, контактора T, освобождаващата теглителна шайба и разклонителния контактор KO, който включва електромагнита на разклонението MO и подготвя веригата на бобината на контактора с ниска скорост на въртене Ml, са включени. Ходът се прибира, освобождавайки заключващия лост и кабината започва да се движи.
Когато кабината се приближи до третия етаж, феромагнитният шунт затваря намотката на сензора TTSZ, неговото съпротивление се увеличава и релето RISZ изчезва, изключвайки релетата ER3 и RUV. В резултат на това контактор B изчезва, затваряйки контакта си, включва контактора с ниска скорост Ml, а контакторът B остава включен, тъй като когато колата се движи, магнитната верига на сензора за точно спиране все още не е затворена, следователно, RITOV контактът все още не е отворен. Двигателят се спира на ниска скорост, работещ в режим на генератор с резистор R., въведен в една фаза на статора.
Веднага след като подът на колата е подравнен с пода на пода, магнитният шунт затваря магнитната верига на бобината на сензора за точно спиране DTOV, релето RITOV изчезва и контакторите B, след това KO и накрая ML са изключени.В резултат на това електромагнитът на двигателя и спирачката се изключва от електрическата мрежа, прилага се механична спирачка и кабината се спира.
За да научите колективна схема за управление на асансьори с преминаващи спирки само при спускане на колата или напълно колективна схема, т.е. при преминаване на спирки, докато колата се движи нагоре и надолу, е необходимо в схема, подобна на тази, обсъдена на фиг. 1, въведете някои допълнения. Например, във верига с двускоростен двигател, индуктивните сензори ID, релето RIS и бутоните за повикване и поръчка на всеки етаж са включени, както е показано на фиг. 2.
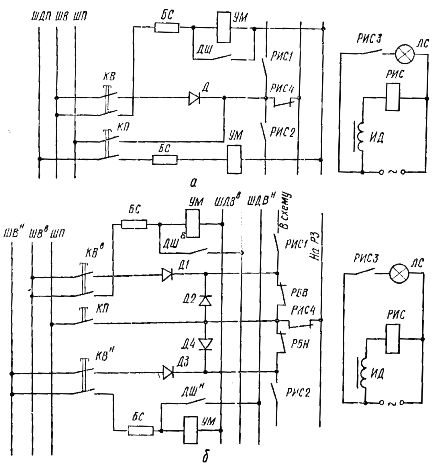
Ориз. 2. Фрагменти от допълнения към колективните схеми за управление на асансьори (един етаж)
В схема с преминаващи спирки при спускане на кабината (фиг. 2, а) обажданията и нарежданията се дават чрез отделни лепкави бутони и следователно могат да бъдат регистрирани по всяко време и предадени на схемата незабавно, с изключение на периода на движение на кабината с пътници нагоре, когато захранващата шина на прехвърлящите контакти повиквания към изпълнителната верига се изключват чрез избирателни контакти от положителната шина.
В пълната схема за селективно управление (фиг. 2, б) има допълнително звънещи вериги за кабини за качване (ШДВв) и спускане (ШДВн), контактите на блокиращи релета RBV и RBN са свързани към контактите на селективната секционна верига изпълнителна верига.
В диаграмите, показани на фиг. 1 и 2, при липса на кабина на пода, бобините на ID индуктивния сензор и релето RIS се захранват. Следователно, когато натиснете командния бутон на командата или извикате KV (те се държат във включено състояние от задържащите магнити на UM, докато не бъдат преодолени от контактите на вратите на мината на този етаж на DSh), a се формира верига (не е показана на фигурите), която включва контролното реле нагоре RUV, ако етажът на местоназначението е по -висок от пода на кабината за паркиране, или контролното реле надолу по LVL, ако етажът на дестинацията е под паркинга на кабината.
След пристигането на колата на етажа на повикване, идентификаторът на индуктивния сензор се обезвъздушава, релето RIS се изключва, отваряйки контактите си, което изключва релето RUV или RUN и лампата LS (колата спира) и чрез затваряне на контакта RIS4 се подготвя верига за изпълнение на поръчката, идваща от колата.
В пълната колективна верига веригата, разделена от контактите RIS1 и RIS2 на пода на паркинга на автомобила, се прекъсва не само от тези контакти, но и от контактите на блокиращото реле нагоре RBV или надолу RBN (техните бобини не са показани в диаграмата), и повикващите вериги на повдигане, спускане и веригата за поръчки са отделени една от друга чрез разделяне на диоди D1 — D4.
Преди да натиснете бутона за обаждане или поръчка, ако посоката на движение на автомобила все още не е избрана, всички контакти във веригата за избор на посока се затварят, с изключение на контактите на RIS4 на пода на паркинга. Следователно, когато се натисне един от тези бутони, сигналите за повикване от етажите, разположени над пода на паркинга на автомобила, са свързани към релейната бобина RUN, а сигналите за повикване от етажите под паркинга на автомобила включват релето RUV. След избиране на посоката, едновременно с релето RUV или LVL, се включва едно от релето, блокиращо противоположната посока RBV или RBN, което прекъсва изхода чрез секционната верига на нетрантерни сигнали за повикване със своите контакти.
В схемата, показана на фиг. 2, а, за да спуснете пътниците, кабината отива без спиране до най -високия етаж на разговора и след това се спуска с преминаващи спирки, а на диаграмата, показана на фиг. 2, б, ако е необходимо да се повдигнат пътници, кабината отива до най -долния етаж на повикването, след което се издига с преминаващи спирки.
В разглежданите схеми селекторите са направени върху релейни елементи. Наред с това се използват и други селектори: гърбица, фотоелектрик, непрекъснато проследяване на четката, стъпване, върху статични елементи и т.н.
При големи пътнически потоци в един коридор са монтирани няколко асансьора, които имат комбиниран контрол по двойки или групи, за да увеличат комфорта и да подобрят мощността. Броят на асансьорите, свързани в групи, обикновено не надвишава четири, а по -често три, въпреки че са известни системи, които съдържат до осем асансьора в група.
При груповото управление обикновено има три основни режима на работа на асансьора: пиково изкачване, върхово спускане и балансирано движение в двете посоки. Активирането на асансьорите за един или друг режим се извършва от диспечера или автоматично посредством часовника за програмиране, инсталиран за всяка група асансьори.
Във високи сгради всяка група асансьори е фиксирана да обслужва определена зона от етажи, други етажи не се обслужват от нея. Ако в групата има няколко асансьора, обслужващи една зона или ниска сграда, за да се увеличи средната скорост на движение чрез намаляване на броя на спирките, могат да се разпределят отделни асансьори за обслужване на четните и нечетните етажи.
За да се осъществи двойно или групово управление на асансьори, техните вериги за управление трябва да бъдат колективни и повикванията към всеки етаж в двете посоки трябва да се регистрират отделно във всяка посока от подходящи устройства за съхранение, съдържащи релета, транзистори и т.н.
Като пример, отразяващ спецификата на работа при сдвоено управление на асансьори с допълнителни релета за паркиране на първия асансьор 1PC и втория асансьор 2PC, помислете за фрагмент от схематичната диаграма, показана на фиг. 3.
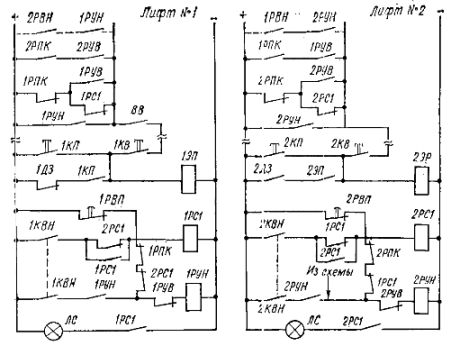
Ориз. 3. Фрагмент от схематична диаграма на сдвоено управление на асансьори: ER — подово реле, RPK — реле за превключване на канали, реле за автоматично стартиране на RVP
В този случай колата, която се е спуснала с пътници на първия етаж, не отговаря на обаждания от други етажи и чака пътници. Ако на първия етаж няма кола, тогава колата, която се е издигнала по поръчка и е освободена, автоматично се изпраща на първия етаж, а когато друга кола е спусната или паркирана, последната остава на пода в края на полета или отива в центъра за натоварване и се използва за работа при повиквания главно в посока потъване.
Релето за паркиране на кабината на първия етаж 1PC1 или 2PC1 се включва след пристигането на кабината на първия етаж от крайния превключвател 1KVN или 2KVN (инсталиран в мините на копирна машина). Тези релета са блокирани. Следователно включването на един от тях показва, че тази кола е пристигнала на първия етаж по -рано от другия. В този случай релето 1PC1 или 2PC1 със затварящия си контакт включва сигналната лампа на LS и с отварящия си контакт прекъсва звънещата верига на асансьора си, прекъсвайки повикването, докато колата е паркирана на първия етаж.
Когато колата напусне първия етаж, нейната сигнална лампа LS изгасва, захранването на извиканите вериги на този асансьор се възстановява веднага след освобождаването на колата и след като колата на друг асансьор пристига на първия етаж, нейното компютърно реле е включен. Тази кабина остава на приземния етаж и чака пътници (което се сигнализира чрез запалване чрез предупредителната лампа LS). Когато колата, която се е издигнала по поръчка, се освобождава и няма повиквания, към веригата се изпраща сигнал, който включва релейните бобини 1RUN или 2RUV 1RUN или 2RUV чрез отварящите контакти на крайния превключвател 1KVN или 2KVN, и колата отива на първия етаж и т.н.
Оборудването за управление на двигателите на типичните асансьори с единично, двойково и групово управление обикновено се намира на типични панели, станции или блокове за управление, инсталирани в машинните отделения.