Управление на двигателя като функция на тока
 Управлението на двигателя може да се извършва в зависимост от силата на тока на статора. Стартовата верига като функция на тока на асинхронен двигател с намотан ротор е показана на фиг. 1 а.
Управлението на двигателя може да се извършва в зависимост от силата на тока на статора. Стартовата верига като функция на тока на асинхронен двигател с намотан ротор е показана на фиг. 1 а.
В момента на стартиране токът достига стойността I1, и след определен интервал от време намалява до стойността I2 (фиг.б). В този момент част от пусковото съпротивление във веригата на ротора автоматично се късо съединява, токът се покачва до стойността I1, след това отново пада до стойността I2, което причинява къса следваща част от стартовото съпротивление. Този процес се повтаря, докато всички етапи на пусковото съпротивление се късо съединят. За тези цели се използва реле за свръхток, чиито намотки са включени в силовата верига на двигателя.
Когато кликнете върху бутон за стартиране SB1 (виж фиг. А) се активира контакторът KM, чиито основни контакти свързват двигателя към мрежата при общото пусково съпротивление в роторната верига. В този случай намотката на KA релето получава захранване, чиито отварящи се контакти са във веригата на бобината на ускорителя K1. Релето KA е настроено така, че времето за реакция е по -кратко от това на контактора K1. Освен това неговите разкъсващи контакти при максимално допустимата стойност стартов ток отворени и когато токът намалее до стойността на превключването му, те отново се затварят, поради което намотката K1 се включва през контактите на релето KA в момента на късо съединение на стартовия етап на съпротивление.
Релето KA ще заработи, преди контакторът за ускорение K1 да бъде включен, а двигателят ще се ускори, когато пусковото съпротивление е напълно въведено. С намаляване на стартовия превключващ ток, контактите на KA релето ще се затворят и бобината K1 ще се включи. В същото време контакт K1 се затваря, осигурявайки самозахранване на бобината независимо от релето KA, а контактът в управляващата верига се отваря, предотвратявайки преждевременното включване на ускорителя K2.
Тъй като захранващите контакти K1 са част от късо съединение на пусковото съпротивление, токът на статора се увеличава до максималната стойност и релето KA, когато се задейства, отваря контактите си в захранващата верига на бобината K2. Когато двигателят достигне достатъчна скорост и токът на статора отново спадне до превключващия ток, контактите на релето KA ще се затворят и ще включат бобината K2, която късо съединява втората степен на пусковото съпротивление със своите контакти.
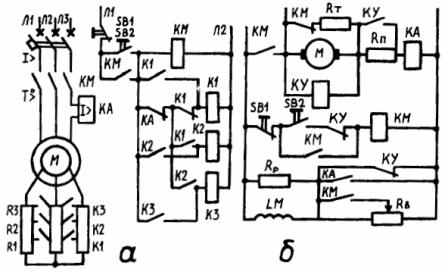
Ориз. 1. Управляващи вериги в зависимост от тока: а — асинхронен двигател с фазов ротор; b — DC двигател с паралелно възбуждане
В този случай токът на статора отново се увеличава, KA релето ще работи и ще отвори контактите си. Намотката K2 няма да загуби захранване, тъй като ще има време да се затвори с помощни контакти K2. Ново намаляване на тока на статора след следващото ускорение ще доведе до включването на намотката K3 и късо съединение на последния етап на пусковото съпротивление. Натискането на бутона SB спира двигателя и веригата е готова за следващо стартиране. С помощта на токовите релета, конфигурирани да се връщат при ток от 12, могат да се спират и обръщат различни електрически задвижвания. Недостатъкът на управляващите вериги в текущата функция е доста големият брой контакти.
За необратимо управление на DC двигател с паралелно възбуждане с мощност от няколко киловата може да се използва един етап от стартовия реостат (виж фиг. В). Диаграмата показва: регулиращо съпротивление RB във веригата на възбуждане; разрядно съпротивление Rp, свързано паралелно с възбуждащата намотка LM; спирачно съпротивление RT, свързано паралелно на котвата M, когато е изключено от мрежата, и стартиращо съпротивление RP, свързано последователно към веригата на котвата по време на периода на стартиране. За да се създаде максимален поток при стартиране, LM намотката на полето в първоначалното положение се включва при пълно напрежение.
Когато бутонът SB2 е натиснат, котвата на двигателя от контактора на линията KM се свързва последователно към мрежата със съпротивлението RP.Релето за управление на пуска SC работи като функция на тока на котвата. С увеличаване на тока, затварящият контакт на KA манипулира съпротивлението RB, увеличавайки магнитния поток на възбуждане, и с намаляване на тока, контактът на KA се отваря и LM намотката се свързва последователно със съпротивлението на реостата RB, поради което магнитният ток намалява.
При стартиране на двигателя увеличеният ток на началната арматура включва релето KA и намотката на LM създава максимален поток. Когато се достигне определена скорост, контакторът за ускорение K се включва, стартовото съпротивление RP се късо съединява, след което двигателят работи според естествените си характеристики. Когато токът на котвата намалее (в резултат на ускорението на двигателя), преди да се включи KA релето, KA контактът във веригата за възбуждане ще се отвори.
LM намотката ще се включи последователно с RB съпротивлението, което ще доведе до отслабване на полевия поток и съответно увеличаване на тока на котвата. Релето KA ще работи отново, увеличавайки потока и едновременно увеличавайки оборотите на двигателя. По време на стартирането релето на космическия кораб се задейства няколко пъти, докато двигателят достигне скоростта, зададена от реостата за управление на RB. Такова вибрационно устройство, работещо като текуща функция, опростява веригата в сравнение с управляващите вериги като функция на времето.
Когато двигателят се включи чрез натискане на бутона SB1, арматурата се включва от отварящия контакт KM към спирачния резистор RT и динамичното спиране се извършва автоматично. В началото на спирането магнитното поле е малко отслабено поради отварянето на КМ контакта върху плъзгача на регулиращия реостат, а токът на възбуждане преминава през цялото съпротивление RB. При по -нататъшно намаляване на оборотите на двигателя, контакторът за ускорение K се изключва и потокът се увеличава, тъй като намотката за възбуждане се включва към пълното мрежово напрежение през отварящия контакт K, което води до увеличаване на спирачния момент .