Безконтактни сензори за положение на механизми
 В тази статия ще говорим за сензори за положение на механизми. По принцип основната функция на всеки сензор е да подава сигнал, когато настъпи конкретно събитие. Тоест, когато възникне задействащо събитие, сензорът се активира и генерира сигнал, който може да бъде аналогов или дискретен, цифров.
В тази статия ще говорим за сензори за положение на механизми. По принцип основната функция на всеки сензор е да подава сигнал, когато настъпи конкретно събитие. Тоест, когато възникне задействащо събитие, сензорът се активира и генерира сигнал, който може да бъде аналогов или дискретен, цифров.
Ограничителните сензори се използват като сензори за положение в продължение на много десетилетия. превключватели. Те се състоят от електрически контакти, които механично отваряне или затваряне, когато някоя променлива (позиция) достига определена стойност. Крайните превключватели от различен тип са важна част от много системи за управление, надеждността на които зависи от тях. такива сензори съдържат подвижни механични елементи, чиито ресурси са ограничени.
В момента крайните превключватели се заменят активно с различни сензори за близост. Най-често сензори за близост от следните видове: индуктивни, генераторни, магнитохеркон и фотоелектронни. Тези сензори нямат механичен контакт с движещия се обект, чието положение се следи.
Безконтактни сензори за положение осигуряват висока скорост и висока честота на включване на механизма. Определен недостатък на тези сензори е зависимостта, тяхната точност от промените в захранващото напрежение и температура. В зависимост от изискванията, изходното устройство на тези устройства може да бъде както следва безконтактен логически елементи електрическо реле.
В схемите за прецизно спиране на електрическите задвижвания сензорите за близост могат да се използват както за командване на преход към намалена скорост, така и за крайна спирка.
Днес на пазара има много видове сензори, но в рамките на тази статия ще подчертаем темата директно индуктивни сензори за положение, тъй като в повече от 80% от случаите именно индуктивните сензори служат като сензори за позицията на механизмите.
Индуктивният сензор се задейства, когато металът се доближи до зоната си на задействане. По тази причина индуктивните сензори за положение се наричат още сензори за присъствие, сензори за близост или просто индуктивни превключватели.
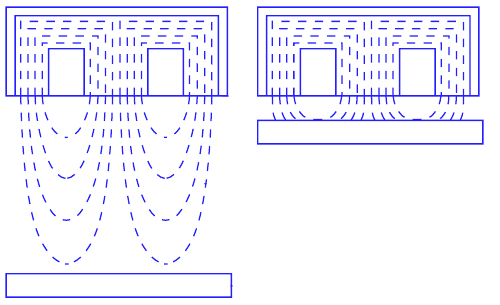
Нека сега разгледаме принципа на работа на индуктивен сензор. Както бе споменато по -горе, когато металът е достатъчно близо до зоната на задействане, сензорът се активира. Това явление се състои във взаимодействието на включените индуктори с приближаващ се към него метал, който рязко променя величината на магнитното поле на бобината, което води до активиране на сензора, той се задейства, на изхода му се появява съответния сигнал.
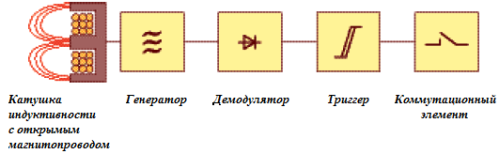
Електронната част на устройството съдържа управляваща верига, която от своя страна управлява реле или транзисторен превключвател. Състои се от следните части:
-
Генератор, който създава електромагнитно поле, необходимо за взаимодействие с обект.
-
Тригер на Шмит, осигуряващ хистерезис при превключване.
-
Усилвател за увеличаване на амплитудата на сигнала, така че да достигне необходимата стойност за задействане.
-
LED индикатор, информиращ за състоянието на превключвателя. Той също така осигурява мониторинг и конфигуриране на производителността.
-
Съединение за защита срещу проникване на твърди частици и вода.
-
Корпус за монтиране на сензора и защита от различни механични влияния.Изработен е от месинг или полиамид и е завършен с крепежни елементи.
Индуктивните сензори за положение се използват широко в системите за промишлена автоматизация, където е необходимо от време на време или постоянно да се определя позицията на която и да е част от механизма. Сензорът генерира сигнал, който се изпраща към задвижването. Като изпълнителен механизъм може да действа стартер, контролер, реле, честотен преобразувател и др. Основното е, че параметрите на сензора съответстват на параметрите на задвижването по отношение на напрежение и ток.
Повечето от сензорите не са захранващи устройства, те са предимно сигнални устройства, поради което самият сензор по правило не превключва нищо мощно, а само контролира, дава контролен сигнал, действа като устройство за иницииране на действие които вече могат да бъдат свързани с превключване на захранването.
Съвременните индуктивни сензори за положение най -често се срещат в две версии на пластмасови или метални корпуси: правоъгълни или цилиндрични. Диаметърът на сензора с кръгло напречно сечение може да бъде от 4 до 30 мм, но най-често използваните диаметри са 18 и 12 мм.
Когато сензорът е монтиран на оборудване, се задава празнина между металната плоча и зоната на задействане на сензора, обикновено това разстояние не надвишава диаметъра на сензора и като правило се оказва 2-3 пъти по-малък от диаметъра му .
Според метода на свързване, индуктивните сензори за положение могат да бъдат двужични, трижилни, четирижилни и петжични.
Двупроводните директно превключват товара, като напр стартерна бобина, тоест те работят като конвенционален превключвател. Двупроводните сензори изискват устойчивост на натоварване, поради което не винаги са подходящи като надежден инструмент, но не губят своята значимост.
Товарът е просто свързан последователно със сензора, ако се използва постоянно напрежение, тогава е важно да се спазва полярността, ако променливата полярност не е важна, основното е превключваната мощност и ток.
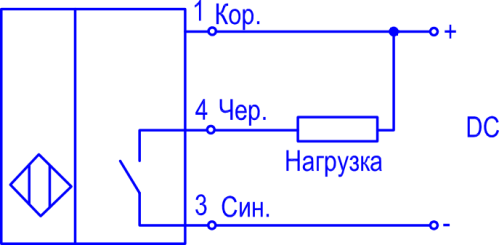
Трижилните сензори имат трети проводник за захранване на самия сензор и това е най-популярното решение. Четирижилните и петжилните сензори имат транзисторни или релейни изходи за свързване на товара, а петият проводник ви позволява да изберете режима на работа на сензора, първоначалното състояние на изходите.
Тъй като изходите могат да бъдат както релейни, така и транзисторни, сензорите съответно са разделени на три типа според устройството на изходите: реле, npn и pnp.
Сензори с релеен изход
Сензор с релеен изход има галванична изолация на захранващата верига от включената верига. Превключва един проводник и напрежението в превключената верига не е особено критично. Тъй като захранващата верига на сензора е галванично изолирана, това може да се счита за предимство на релейния сензор. Сензорите от този тип обикновено са големи.
Сензори с pnp транзисторен изход
Сензорът има pnp транзистор на изхода, който комутира положителния проводник с товара. Към колекторната верига на изходния pnp транзистор е свързан товар, който постоянно е свързан към минус чрез втория си проводник.
Сензори с транзисторен изход npn
Сензорът има NPN транзистор на изхода, който комутира отрицателния проводник с товара. Към колекторната верига на изходния npn транзистор е свързан товар, който е постоянно свързан с втория си проводник към положителния проводник.
Според първоначалното състояние на изходите, индуктивните сензори за положение могат да бъдат с нормално затворени или нормално отворени контакти. Първоначалното състояние означава, че това състояние е в момента, в който сензорът все още не е задействан, тоест не е активиран.
Ако изходните контакти са нормално затворени, тогава товарът е свързан в неактивно време, ако е нормално отворен, тогава докато сензорът не се задейства, натоварването ще бъде прекъснато и захранването няма да бъде подадено към задвижването (например контактор ). Обикновено затворените контакти са обозначени в английски формат — N.C. (Нормално затворено), нормално отворено — N.O. (Нормално отворено).
По този начин сензорите с транзисторни изходи са четири вида: два вида според проводимостта (pnp или npn) и два типа според първоначалното състояние на изходите. Възможно е също да има забавяне при включване или изключване.

В зависимост от типа на задвижването, което е свързано към сензора, както и от начина на захранване, логиката на сензора може да бъде положителна или отрицателна. Това се дължи на нивото на напрежение, което активира входа на устройството.
Ако входът се активира, когато отрицателният проводник на задвижващия механизъм е свързан към земята, към минуса, тогава логиката се нарича отрицателна, такава връзка е характерна за сензори с транзисторни изходи тип npn.
Положителната логика съответства на свързването на положителния проводник на задвижването към положителното захранване при активиране, тази логика е типична за сензори с транзисторни изходи тип pnp. Най -често има положителна логика на работата на индуктивните сензори за позицията на механизмите.
По -стари най -често използвани видове индуктивни сензори за положение
Индуктивни сензори за положение IKV-22
Индуктивни сензори IKV-22. Работата на тези сензори се основава на принципа на промяна на индуктивното съпротивление на намотки със стоманена сърцевина при промяна на въздушната междина в магнитната верига.
На стоманена плоча е монтирана магнитна верига с две намотки, затворена с пластмасов капак. От долната страна към плочата са прикрепени два MBGP кондензатора (единият с капацитет 15 μF, 200 V, другият — 10 μF, 400 V). Кондензаторите са покрити с капак. Кабелът е свързан чрез уплътнението. На механизма е монтиран магнитен шънт, чиито размери трябва да бъдат най -малко: дебелина 2 мм, ширина 80 мм, дължина 140 мм. Въздушната междина между магнитната верига и шунта е 6 ± 4 mm.
Изходното реле обикновено е включено и изключено в момента, в който магнитният шунт преминава през сензора, когато поради промяна в индуктивното съпротивление на бобината възниква резонанс на токове и токът през бобината на релето пада. Тези релета: тип MKU-48, 12 V AC, изтеглящ ток не повече от 0,45 A, отпадащ ток не по-малък от 0,1 A. Захранващото напрежение на сензорната верига е 24 V AC реле.
Индуктивни датчици за положение ID-5
В металургичните цехове се използват индуктивни сензори от типа ID-5, предназначени да работят при температури на околната среда до + 80 ° C и влажност до 100%. Проводимият прах и котлен камък са приемливи. С датчика се използва изходен полупроводников усилвател от типа UID-10. Изходната мощност на усилвателя (25 W) е достатъчна за включване на широко разпространените релета REV-800, контактори KP21, MK-1 и др.
Въздушната междина между сензора и наблюдавания феромагнитен обект може да бъде до 30 мм. Размерите на сензора ID-5 са 187x170x70 mm, захранващото напрежение е 220 V ± 15%, 50 Hz.
Безконтактни превключватели с малък размер BSP
Малките превключватели за движение BSP-2 (с безконтактен изход, към логически елемент) и BRP (с изход към реле PE-21, 24 V, 16 Ohm) се използват при металорежещи машини.
Превключвателят BSP-2 се състои от сензор за диференциален трансформатор и полупроводников спусък. Магнитната система на първата намотка на сензора се премества от стоманена плоча, а втората намотка се манипулира, когато се движи над магнитната си система, свързана с механизма на плоската котва. Намотките са включени в обратната посока.
Ако котвата е над сензора, индуктивните реактиви на бобините са равни и изходът на сензора на диференциалния трансформатор е нула. В този случай на изхода на спусъка се появява напрежение най -малко 2,5 V, което е достатъчно, за да работи логическият елемент.
При липса на котва над сензора, към спусъка се прилага напрежение, което го връща в първоначалното му състояние. След това изходният сигнал на превключвателя е нула.
Принципът на действие на превключвателя BRP е в много отношения подобен на този на BSP-2.Индуктивен сензор (според веригата на диференциалния трансформатор), спусък и усилвател са монтирани вътре в кутията. Вторичните бобини с различен брой завои се включват в обратна посока. Тъй като котвата припокрива магнитната система на сензора, сигналът намалява и след смяна на фазата, спусъка се превключва и се задейства външно изходно реле (PE-21, 24 V, 16 Ohm).
Котвата, фиксирана към механизма, има размери 80x15x3 mm. Разликата между котвата и сензора е 4 мм. Точността на превключвателите в номиналния режим е ± 0,5 mm, задействащият диференциал е не повече от 5 mm. При. колебания в захранващото напрежение и температура, грешката на превключвателите BSP-2 и BRP може да достигне ± (2.5-f-3.0) mm.
Високочестотни индуктивни сензори VKB
Високоточни индуктивни сензори от тип VKB с U-образна или плоска арматура се използват и за автоматизация на металорежещи машини. Полюсите на вградения трансформатор образуват отворена електромагнитна система. Работната въздушна междина е 0,1-0,15 мм.
Изходното напрежение от вторичната намотка на трансформатора се подава към диференциална измервателна верига, а след това към транзисторен усилвател. Общата грешка на сензора с температурни колебания от 5 до 40 ° C и напрежение от 85 до 110% от номиналната стойност е ± (0,064-0,15) mm, разликата в отклика не надвишава 0,4 mm. Максималната скорост на движение на механизма е 10 m / mm. Размери на сензора 62x34x24 мм. Захранващо напрежение 12 V.
Специални видове прецизни индуктивни сензори за металорежещи машини с диференциална верига имат грешка по -малка от ± 0,01 mm. Такива сензори включват безконтактен превключвател за движение от типа VPB12, състоящ се от сензорен блок на електронен блок. Сензорният блок включва индуктивен работен сензор, сензор за индуктивна компенсация и печатни платки. Механизмът е монтиран: управляващ феритен елемент. Захранващо напрежение 12 V DC. Максималното разстояние на експозиция е не повече от 0,12 мм. Реле от тип RPU-0 може да се включи на изхода на сензора. Максималният ток на натоварване на изходното устройство е 0,16 A.
Датчици за положение на генератора
Сензорите от този тип са компактни и много точни. Сензорите генератори от сериите KVD-6M и KVD-25 (с прорези), KVP-8 и KVP-16 (самолет) са се доказали добре. Подходящи са за използване при високи концентрации на влага и прах. В корпус от удароустойчив полистирол са разположени елементите на транзисторната верига на сензора (генератор и спусък). Запечатването се извършва със студено втвърдяваща смес. Работният температурен диапазон е от — 30 до +50 ° С.
HPC сензорът генерира дискретен сигнал, когато метална плоча («флаг») преминава през слота, причинявайки срив в генерирането и превключване на спусъка. Ширината на слота е 6 мм за сензора KVD-6M и 25 мм за сензора KVD-25.
Сензорите KVP-8 и KVP-16 се задействат, когато покрай тях преминава метална плоча на максимално разстояние съответно 8 и 16 мм.